专业提供仓储物流升级改造、无人搬运机器人产品
一家专注复合机器人、全向激光AGV研发制造国家高新技术企业
全国服务热线 400-007-3860
一家专注复合机器人、全向激光AGV研发制造国家高新技术企业
全国服务热线 400-007-3860





传统的AGV是以电池为动力,装有非接触导向装置和独立寻址系统的无人驾驶自动运输车。由于采用电池供电,因此,传统的AGV的功率和行驶距离受到极大的限制,AGV的利用率也不高。为了提高AGV的利用率,就必须对AGV的电池进行经常性的充电。为了保证AGV 在生产线上不用移出生产过程就可以完成充电,必须在安装整个生产过程系统中,在允许 AGV暂停的地方(比如分段运输区,转向区,装载停止区等)设置并安装电池充电站,定时定点对AGV进行充电。电池充电站由基板和集电器组成,基板安装在板上或者用支架侧装在 AGV 运行轨道的旁边,集电器则安装在AGV上。
充电器给基板提供电流,一旦 AGV 行驶到充电位,车辆上的集电器就与充电基板相接触,就会对 AGV 进行充电。随着功能强大的电池的发展,能够允许电池在几秒钟内进行快速充电,这一技术使得 AGV 在生产线上不用移出生产过程就可以完成充电。AGV车动力电源一般用的是传统的“高倍率开口镉镍电池”,以适应其快速充电和较大电流放电的要求。但受“镉镍电池”记忆效应的影响,使用、维护比较麻烦。同时由于“镉镍电池”中镉的污染,不适应环保的要求。此外,充电站数量的增多,也增加了AGV运输系统的总建设成本。
随着IPT(Inductive Power Transfer)非接触供电技术的发展,将IPT非接触供电技术应用于AGV物流运输系统,将极大改善目前AGV供电系统的缺陷。这种供电系统可以在AGV不带电池的情况下为小车提供驱动电源和控制电源,也可以在不设充电站的情况下为AGV的电池进行连续或定时充电。但是非接触供电受地下供电电缆限制,不利于进行现场改造,路线柔性变化降低。
在线自动充电系统
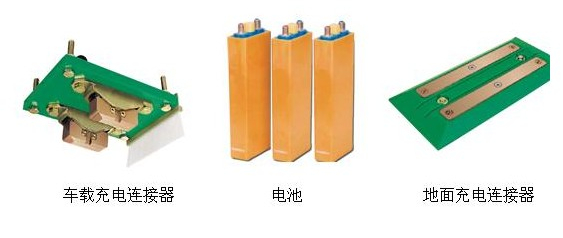
AGV使用高容量镉镍充电电池作为供电电源,该种电池一方面在短时间内可提供较大的放电电流,在AGV启动时可提供给驱动系统以较大的加速度,另一方面该种电池的最大充电电流可达到额定放电电流的6倍以上,使用大电流充电即可减少电池的充电时间, AGV可利用在线停车操作的时间进行在线充电,快速补充损失的电量,使AGV在线24小时连续运行成为了可能。
在AGV运行路线的充电位置上安装有地面充电连接器,在AGV车底部装有与之配套的充电连接器,AGV运行到充电位置后,AGV充电连接器与地面充电接器的充电滑触板连接,最大充电电流可达到200安培。
非接触供电系统:
输送线的供电系统是靠感应供电装置或IPT传送的。轨道电源控制柜能产生高频持续循环的交流电源。轨道电缆以两根铺设,一根是输出电流,一根是返回电流。作用是使电流呈反向流动。这样能导致在两根电缆之间形成双倍强烈的磁场,而在两电缆外部没有磁场。自动导向小车由感应供电装置,最理想的状态是感应供电装置平行与轨道电缆并且在其正上10毫米处。如果置偏离轨道就会使一侧的电源消失,直到电流获得器与轨道电缆保持一致。同时在动力电缆旁铺设了一根信号电缆,按照生产和节拍要求,定点在信号电缆附近±5mm埋设定位感应器。
两种方式对比:
| 对比项目 | 在线自动充电 | 非接触式供电 | 备注 |
| 地面施工量 | 小 | 大(精细) | 前者只需要预埋充电机到充电点的电缆(较短,一般小于4米),后者需要在整个环线预埋电缆。 |
| 系统柔性 | 好 | 差 | 一旦工艺改变、需要重复施工。后者若某台车有故障,需要人工解抱闸后推出环线。 |
| 系统价格 | 一般 | 一般 | 无太大差别 |
| 精度 | 高 | 高 | 后者电缆代替前者的磁条导航。 |
| 使用寿命 | 一般 | 较长 | 前者需要更换电池 |
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询