专业提供仓储物流升级改造、无人搬运机器人产品
一家专注复合机器人、全向激光AGV研发制造国家高新技术企业
全国服务热线 400-007-3860
一家专注复合机器人、全向激光AGV研发制造国家高新技术企业
全国服务热线 400-007-3860





一、 案例概述:
本案例设计用于电子电器行业中电子产品从产线到仓库的规范化上下架分类存储。
本案例需要涉及到大重量的成品运输,以及规模化的堆高存储,所以需采用多辆小型激光叉车配合控制调度系统一同工作。对产线上下来的成品进行,批量化、规范化的运输到仓库,并且自动搬运到货架上进行记录存储。
而且一辆叉车就能运载多个员工多次运载的货物量。而且激光叉车与控制系统配合,可以对每次运载的货物根据不同批次或者不同产品规则进行分开堆高存储,并记录产品所存储的位置,方便以后查找出货。
采用智久激光叉车可全面改善产线到仓库成品运输的效率,减少企业在成品运输环节的大部分的人工成本投入,减少我国人口红利下降带来的员工成本过高,招工难等问题。解决原本采用机械叉车堆高存储造成的维护及消耗费用成本过高,暴力运输导致货物损坏等问题。使仓库存储更加智能化,改善原本杂乱无章的仓库环境,更加合理的分配利用仓库空间。
三、 解决方案
根据现场的勘察情况,AGV现场示意图及系统规划如下:
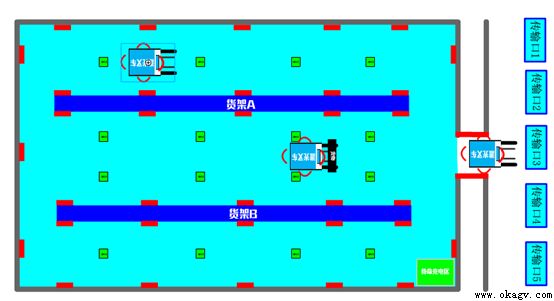
1. 线路说明与技术要点:
a) 激光叉车的工作流程
1.激光叉车小车在待命区待命,等待执行命令。
2.当成品产线传输口区里有成品下线时,感应装置自动向控制系统发送任务信息。
3.控制系统收到任务信息反馈后,会根据各辆激光叉车的位置进行任务分配并规划好叉车运行的路线以及货物堆放的货架号,计算完成后控制系统发出任务指令。
4.激光叉车利用自身装配的网络装置,激光叉车接收到任务信息后,通过墙壁上贴有的反光装条反射激光判断路线与障碍物,出发前往产线传输装载区。
5.激光叉车,通过预先设置好的路线到达成品产线传输口区等待货物下线,并对货物进行自动装载,并沿着控制系统规划好的路线运载货物回到仓库。
6.激光叉车通过感应地面上贴有的RFID标签,对货架的所在地进行定位,并找到货物所要堆放的货架位置。

7.到达要存放的货架前后,激光叉车先将货物托高到所需的高度,将货物放进货架中。并对货架上的信息卡进行信息读写,反馈给控制系统,对货物的存放位置进行记录。
8.货物上架完成后,激光叉车退出货架位置,继续进行下一个任务,或者回到服务区充电或者待命。
上一条:AGV机器人多代理路径寻的四大研究方向 下一条:AGV小车导航技术比较分析
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信咨询