Ή®“ΒΧαΙ©≤÷¥ΔΈοΝς…ΐΦΕΗΡ‘λΓΔΈό»ΥΑα‘ΥΜζΤς»Υ≤ζΤΖ
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860





ΡΩ«ΑΘ§Ω…“‘±Μ”Ο”ΎΖ«Ϋ”¥Ξ’œΑ≠ΈοΧΫ≤βΒΡΦΦ θ÷ς“Σ”–4÷÷ΘΚΦΛΙβ≤βΨύΦΦ θΘ§ΚλΆβΦΦ θΘ§≥§…υ≤®ΦΦ θΦΑΈΔ≤®ΦΦ θΘ§Τδ÷–ΦΛΙβ…®Οη ΫΚΆΕύΧΫΆΖΚλΆβΙβΒγ ΫΦΦ θ‘ΎAGV…œΒΡ”Π”Ο“―Ψ≠≥… λΘ§ΕχΤδΥϊΝΫ÷÷ΖΫ ΫΕΦΜΙ¥Π”ΎΙΛ≥Χ≤ζΤΖ―ι÷ΛΫΉΕΈΓΘ
1 ΦΛΙβ…®ΟηΧΫ≤β
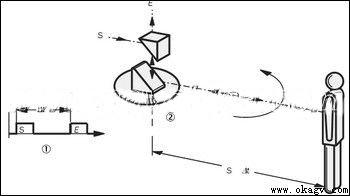
»γ…œΆΦΥυ ΨΘ§ΦΛΙβΧΫ≤βΆ®≥Θ «≤…”ΟΙβΒγΒς÷ΤΒΡΖΫ ΫΘ§”…ΦΛΙβΕΰΦΪΙήœρΆβΖΔ…δΨ≠ΙΐΒς÷ΤΒΡ¬ω≥εΦΛΙβ χΘ®Laser BeamΘ©SΘ§Β±ΗΟΦΛΙβ χ”ωΒΫΈοΧεΖ¥…δΜΊά¥ ±Θ§”…ΦΛΙβΧΫ≤βΤςΫ” ήΒΫΆ§―υΒΡ¬ω≥ε–≈Κ≈EΘ§Ά®ΙΐΕ‘S–≈Κ≈ΚΆE–≈Κ≈ΈΔ–Γ ±Φδ≤νΒΡΦΤΥψΘ§ΨΆΡήΙΜΒΟΒΫΦΛΙβΖΔ…δΒψ”Ύ±Μ≤β ΈοΧε÷°ΦδΒΡΨύάκΝΥΓΘ‘ΎΦΛΙβΖΔ…δΤς…œΦ”“‘–ΐΉΣΘ§Φ¥Ω… ΙΤδΧΫ≤βΡ≥“Μ…»–ΈΖΕΈßΡΎΒΡΈοΧεΘ§¥”Εχ Βœ÷ΦΛΙβ…®Οη’œΑ≠ΈοΧΫ≤βΓΘ
¥ΥœνΦΦ θ‘≠άμΦρΒΞΘ§ΒΪ’φ’ΐ“Σ Βœ÷»¥≤ΔΖ«“Ή ¬Θ§ΤδΙβ―ßΤςΦΰΒΡΨΪΕ»Θ§ Β ±ΦΤΥψΨΪΕ»ΚΆΩΊ÷ΤΨΪΕ»“Σ«σΕΦ °Ζ÷ΗΏΓΘ
ΡΩ«Α”Π”Ο”ΎAGV…œΒΡΦΛΙβ…®Οη’œΑ≠ΈοΧΫ≤βΒΡ≤ζΤΖ «”…Β¬ΙζSICKΙΪΥΨ…ζ≤ζΒΡS3000Θ§ Τδ”≈Βψ «ΘΚΨΪΕ»ΫœΗΏΘ§ΩΙΗ…»≈–‘ΚΟΘ§Ω…“‘≤…”Ο±ύ≥ΧΖΫ ΫΕ‘ΧΫ≤β«χ”ρΫχ––…ηΕ®≤Δ”–“ΜΕ®ΒΡΉ‘―ßœΑΙΠΡήΓΘΤδ»±Βψ «ΘΚ”…”ΎΦΛΙβΒΡΧΊ–‘Θ§Έό¬έ≤…”Ο‘≤÷υΆΗΨΒΜΙ «άβ–ΈΆΗΨΒΘ§ …®ΟηΖΕΈßΕΦ÷ΜΩ…Ρή‘Ύ“ΜΗωΥ°ΤΫ…»–ΈΤΫΟφ…œΘ§‘Ύ¥Ι÷±ΖΫœρ…œΒΡΨ÷œό–‘Κή¥σΘΜ¥”ΟςΝΝΒΡΜΖΨ≥÷–ΆΜ»ΜΫχ»κΚΎΑΒΜΖΨ≥ ±Θ§”–ΕΧ ±ΒΡΓΑ÷γΟΛΓ±œ÷œσΘΜ”…”Ύ≤…”ΟΗΏΨΪΕ»ΒΡΤςΦΰΦΑΩΊ ÷ΤΤςΦΰΤδΦέΗώΚήΗΏΘΜ“ΜΑψ”ΟΜß≤ΜΨΏ±ΗΕ‘ΤδΫχ––±ύ≥ΧΒΡΡήΝΠΘ§ΈόΖ®Βς’ϊΤδΧΫ≤βΖΕΈßΘ§–η“ΣΉ®“ΒΦΦ θ»Υ‘±œ÷≥ΓΖΰΈώΘ§“ρ¥ΥΤδΈ§ΜΛΖ―”Ο“≤Μαœύ”Π‘ωΦ”ΓΘ
2 ΕύΧΫΆΖΚλΆβΙβΒγΙήΧΫ≤β
’β «‘ΎAGV…œ”Π”ΟΉν‘γΒΡΖΫΖ®Θ§ΒΫΡΩ«ΑΈΣ÷Ι“≤ΜΙ «ΉνΈΣΤ’±ιΒΡΖΫΖ®ΓΘ
Ά®ΙΐΕ‘≤®≥ΛΈΣ0.76~1000umΒΡΚλΆβΙβΫχ––Βς÷ΤΖΔ…δΘ§Ϋ” ήΖ¥…δΜΊά¥ΒΡΙβœΏΘ§Ά®ΙΐΖ¥…δΙβ«Ωά¥ΙάΥψ±ΜΧΫ≤βΈοΧεΒΡΨύάκΘ§”…”ΎΚλΆβΙβΒΡ≤®≥ΛΖΕΈßΫœΩμΘ§Ρ≥“Μ≤®≥ΛΒΡΙβœΏΚή»ί“Ή±ΜΧΊΕ®ΒΡΈοΧεΈϋ ’Θ§Ζ¥…δΙβ«ΩΒΡΥΞΦθΝΩ±Ί»Μ≤ΜΆ§Θ§Μυ”Ύ’β―υΒΡ‘≠άμΘ§ΤδΦλ≤βΨύάκΕύΈΣΫϋΥΤ÷ΒΓΘ
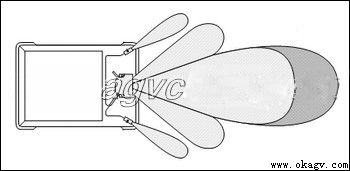
ΡΩ«ΑΩ…”Ο”ΎAGV…œΒΡΕύΧΫΆΖΚλΆβΙβΒγΙήΧΫ≤βΤς≤ζΤΖΚήΕύΘ§Τδ÷–“‘»’±ΨSUNXΙΪΥΨ…ζ≤ζΒΡP2œΒΝ–≤ζΤΖΉνΈΣ≥… λΘ§“―±ΜΕύ ΐAGV…ζ≤ζ≥ßΦ“»œΩ…ΓΘΗΟ≤ζΤΖΒΡ”≈Βψ «ΘΚΚλΆβœΏΒΡΖΔ…δ≥ ΉΕ–Έ…Δ…δΘ§ΧΫ≤βΖυΟφΫœ¥σΘΜΤδΫαΙΙΦρΒΞΓΔΧεΜΐΫœ–ΓΘΜ Ι”ΟΈ§ΜΛΦρΒΞΖΫ±ψΘ§”ΟΜßΩ…Ή‘––ΒςΫΎΧΫ≤βΨύάκΘΜΩ…Χφ¥ζΒΡ≤ζΤΖ÷÷άύΫœΕύΘ§≤ζΤΖΦέΗώœύΕ‘Ϋœ ΒΆΓΘΤδ»±Βψ «ΘΚ≤ΜΆ§ΈοΧεΕ‘ΚλΆβΙβΒΡΈϋ ’≥ΧΕ»≤ΜΆ§Θ§Ω…ΒΦ÷¬ΧΫ≤βΨύάκ…œΒΡΦΪ¥σ≤ν±πΘΜΤδΡΎ≤ΩΕύΈΣΡΘΡβΒγ¬ΖΘ§ΧΫ≤βΨΪΕ»≤ΜΗΏΓΘ
3 ΕύΧΫΆΖ≥§…υ≤®ΧΫ≤β
‘Ύ…ζΜν÷–Θ§Έ“Ο«“―Ψ≠Ω¥ΒΫΝΥ≥§…υ≤®ΧΫ≤βΤςΒΡ”Π”Ο®D®DΤϊ≥ΒΒΙ≥ΒάΉ¥οΘΓΒΪ’φ’ΐ“ΣΫΪΤδ”Ο”ΎAGV»¥≤Μ «Ρ«Ο¥»ί“ΉΒΡΘ§ΒΎ “ΜΘ§AGV…œΒΡΧΫ≤βΤς «Υφ ±¥Π”ΎΙΛΉςΉ¥Χ§Θ§Ε‘ Τς Ι”Ο ΌΟϋ”–“Σ«σΘΜΒΎΕΰΘ§AGV…œ Ι”ΟΒΡ≥§…υ≤®ΧΫ≤βΤςΒΡΧΫ≤βΖΕΈß“Σ«σΗϋ‘ΕΘΜΒΎ»ΐΘ§AGV…œ Ι”ΟΒΡ≥§…υ≤®ΧΫ≤βΤς±Ί–κ±ήΟβΕύ≥Βœύ”ω ±ΒΡ≥§…υ≤®œύΜΞΗ…»≈ΓΘ
Υδ»Μ≥§…υ≤®ΦΦ θ‘ΎΈ¥ά¥Ω…Ρή±Μ”Ο”ΎAGV…œΘ§ΒΪ”…”ΎΗΟΦΦ θΉ‘…μΒΡΧΊ–‘œό÷ΤΘ§»γ…υΤΒΖΕΈß20kHzΓΪ100kHzΘ§Υδ»Μ≤®≥ΛΕΧΘ§÷Ηœρ–‘ΚΟΘ§ΒΪΤδΒς÷ΤΧΊ–‘Κή≤νΘ§Κή»ί“Ή ήΒΫΆβΫγ‘κ…υΒΡΗ…»≈Θ§”»Τδ «‘ΎΙΛ≥ßΒΡ”Π”ΟΘΜ”κΚλΆβΦΦ θ“Μ―υΘ§…υ≤®“≤»ί“Ή±ΜΡ≥÷÷ΧΊΕ®ΒΡ≤ΡΝœΈϋ ’Θ§Εχ”Αœλ≤βΨύΨΪΕ»ΓΘ
4 ΈΔ≤®ΧΫ≤β
¥ΥœνΦΦ θ «άϊ”ΟΈΔ≤®Θ®0.8ΓΪ3GHzΘ©ΒΡΕύΤ’ά’–ß”ΠΘ§”ΟάΉ¥ο‘≠άμΕ‘±Μ≤βΈοΧεΫχ––ΧΫ≤βΘ§ΡΩ«Α‘ΎAGV…œΜΙΟΜ”–”Π”Ο ΒάΐΓΘ”Ο¥ΥΦΦ θΘ§Ω… ΙAGVΒΡΧΫ≤β«χ”ρ‘ω¥σΘ§ΧΫ≤βΤςΩ…“‘“ΰ≤ΊΑ≤ΉΑΓΘΒΪΤδΦλ≤βΒΡΨΪΕ»”κΈοΧε‘ΥΕ·ΒΡΥΌΕ»ΚΆΈοΧεΒΡ¥σ–Γ”–ΙΊΘ§“ρ¥Υ“ΜΑψ≤Μ ”Ο‘Ύ‘ΥΕ·…η±Η…œΓΘ
5 ΙΊ”ΎAGV’œΑ≠ΈοΧΫ≤βΤςΒΡ―Γ–ΆΥΒΟς
Ε‘”ΎΧΫ≤βΤςΒΡ―Γ–ΆΘ§‘Ύ“ΜΑψ«ιΩωœ¬Θ§Έ“Ο« «ΗυΨί”ΟΜßΒΡΕ©ΙΚΦέΗώά¥ΨωΕ®ΒΡΘ§“ρΈΣΦΛΙβ ΫΒΡ”κΚλΆβ ΫΒΡ≤ζΤΖΦέΗώ≤ν“λ «Ψό¥σΒΡΓΘ»τ”ΟΜß”–ΧΊ β–η«σΘ§Μρ”ΟΜßΕ‘ΗΟάύ≤ζΤΖ”–ΥυΝΥΫβΘ§Ω…“‘”…”ΟΜß÷ΗΕ®Θ§≤ΔΗΕ“‘œύ”ΠΒΡΦέΗώΓΘ
6 ΤδΥϊΥΒΟς
AGVΒΡ“ΜΑψ Ι”ΟΜΖΨ≥ «Έό»ΥΙΛΉς«χΘ§Α≤»ΪΖάΜΛΥδ»Μ °Ζ÷±Ί“ΣΘ§ΒΪ÷Μ”–‘ΎΆΜΖΔ«ιΩω ±≤≈ΤπΉς”ΟΘ§“ΜΑψ≤Μ”Π”–»ΥΈΣΙ “β¥ΞΖΔΑ≤»ΪΖάΜΛœΒΆ≥Θ§’β―υΕ‘AGVΒΡΡΎ≤ΩΩΊ÷ΤΤςΦΰΘ§ΦΑ––ΉΏœΒΆ≥ «Κή≤ΜάϊΒΡΘ§Μα¥σ¥σΥθΕΧΤδ Ι”Ο ΌΟϋ”ΑœλΒΦ“ΐΓΔΒΦΚΫΨΪΕ»ΘΓ
…œ“ΜΧθΘΚAGVΒΡ«ΐΕ·–Έ Ϋ œ¬“ΜΧθΘΚAGVΕ‘ΒΊΟφ–– Μ“Σ«σΥΒΟς
ΒγΜΑΘΚ0755-29851810
¥Ϊ’φΘΚ0755-27307147
Q QΘΚ2448209188
” œδΘΚzfj@okagv.com
ΒΊ÷ΖΘΚ…νέΎ –±ΠΑ≤«χΗΘΚΘΫ÷Βά¥σ―σ¬Ζ÷–ΝΗΗΘΑ≤ΜζΤς»ΥΩΤΦΦ‘Α14ΕΑ

Copyright © 2012-2023 …νέΎ –≈Ζνχ÷«ΡήΜζΤς»ΥΙ…Ζί”–œόΙΪΥΨ Αφ»®Υυ”–ΓΓ ‘ΝICP±Η 19115608 Κ≈ΓΓxml sitemap
ΝΣœΒΒγΜΑ
400-007-3860QQΉ…―·
2448209188ΈΔ–≈
ΈΔ–≈Ή…―·