Ή®“ΒΧαΙ©≤÷¥ΔΈοΝς…ΐΦΕΗΡ‘λΓΔΈό»ΥΑα‘ΥΜζΤς»Υ≤ζΤΖ
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860





AGVΒΡΒΦΚΫΦΤΥψΫι…ή
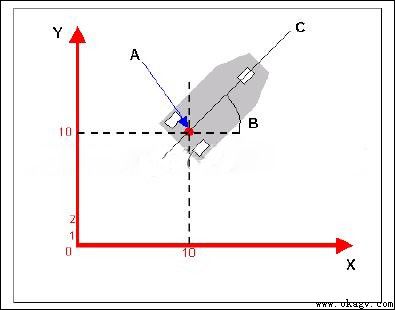
ΦρΒΞΒΊΥΒΘ§AGVΒΦΚΫΨΆ «»ΟAGV»Ζ Β÷ΣΒάΉ‘ΦΚ‘ΎΡΡάοΘ§Φ¥»ΖΕ®AGVΉ‘…μ‘Ύ»ΪΨ÷Ήχ±ξœΒ÷–ΒΡΈΜ÷ΟΘ®x,yΘ©ΚΆΚΫœρΓΘ»γΆΦΥυ ΨΘ§AGV“‘ΒψA±μ ΨAGV‘Ύ’ϊΗωΤΫΟφΉχ±ξœΒ÷–ΒΡΈΜ÷ΟΘ§Φ¥≤ΈΩΦΒψΘ§ΗΟΈΜ÷Ο≥ΐΝΥxΘ§y–≈œΔΆβΜΙΑϋΚ§AGV––ΫχΖΫœρ”κx÷αΒΡΦ–Ϋ«–≈œΔΘ®ΚΫœρΘ©ΓΘ
AGV ΒΦΚΫΒΡΉΦ»Ζ–≈œΔά¥Ή‘ΒΊΟφΙΧΕ®ΒΡΑ–±ξΘ®Ε®ΈΜΩιΜρΦΛΙβΖ¥…δΑεΒ»Θ©Θ§≥Τ÷°ΈΣAGVΒΡΓΑ ΒΦ ΈΜ÷ΟΓ±Θ§ΒΪΆ®≥Θœό”Ύ≥ΓΒΊΧθΦΰΦΑΕ®ΈΜ¥ΪΗ–ΤςΧθΦΰΒΡœό÷ΤΘ§ ΒΦ ΈΜ÷Ο–≈œΔΒΡ Β ±–‘≤ΜΡή¬ζΉψAGV‘ΥΕ·ΩΊ÷ΤΒΡ–η“ΣΘ§ΈΣ¥Υ‘Ύ ΒΦ ΈΜ÷Ο≤…―υΒΡ÷ήΤΎΡΎΜΙ–κΫχ––ΈΜ÷ΟΙάΥψΘ®Dead ReckoningΘ©ΓΘ
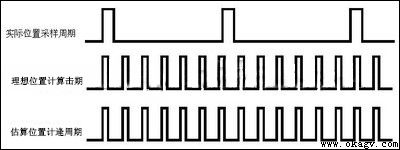
AGVΒΡ ΒΦ ΈΜ÷Ο «÷ΗΗυΨίΒΊΟφΙΧΕ®Α–±ξΦΤΥψΕχΒΟΒΫΒΡ ΒΦ ΈΜ÷Ο–≈œΔΘ§ΤδΨΪΕ»»ΓΨω”ΎΑ–±ξΒΡ≤βΝΩΨΪΕ»ΓΘ
AGVΒΡάμœκΈΜ÷Ο «÷Η‘ΎάμœκΉ¥Χ§œ¬ΒΡΈΜ÷ΟΘ§”…AGVΒΡ¬ΖΨΕΙλΦΘΖΫ≥ΧΥυ»ΖΕ®ΓΘ
AGVΒΡΙάΥψΈΜ÷Ο «÷Η‘Ύ ΒΦ ΈΜ÷ΟΒΡ≤…―υ÷ήΤΎΡΎΘ§Ά®ΙΐAGVΒ±«ΑΥΌΕ»ΚΆΉΣœρΫ«–≈œΔΕ‘ΈΜ÷ΟΫχ––ΙάΥψΥυΒΟΒΫΒΡΈΜ÷ΟΓΘ
ΙάΥψΈΜ÷Ο «’φ’ΐ”Ο”ΎAGVΒΦ“ΐΩΊ÷ΤΒΡΘ§Εχ ΒΦ ΈΜ÷Ο÷Μ «Ε®ΤΎΕ‘ΙάΥψΈΜ÷ΟΫχ–––ό’ΐΘ§ΒΦΚΫΥυ–ηΫβΨωΒΡΈ ΧβΨΆ «ΗυΨίAGVΒΡ‘ΥΕ·ΡΘ–ΆΘ§ΙάΥψ≥ωAGVΒΡΒ±«ΑΈΜ÷ΟΘ§Φ¥ΙάΥψΈΜ÷ΟΓΘ
…œ“ΜΧθΘΚAGVΒΡΒΦ“ΐΦΤΥψΖΫΖ® œ¬“ΜΧθΘΚAGVΒΡ«ΐΕ·–Έ Ϋ
ΒγΜΑΘΚ0755-29851810
¥Ϊ’φΘΚ0755-27307147
Q QΘΚ2448209188
” œδΘΚzfj@okagv.com
ΒΊ÷ΖΘΚ…νέΎ –±ΠΑ≤«χΗΘΚΘΫ÷Βά¥σ―σ¬Ζ÷–ΝΗΗΘΑ≤ΜζΤς»ΥΩΤΦΦ‘Α14ΕΑ

Copyright © 2012-2023 …νέΎ –≈Ζνχ÷«ΡήΜζΤς»ΥΙ…Ζί”–œόΙΪΥΨ Αφ»®Υυ”–ΓΓ ‘ΝICP±Η 19115608 Κ≈ΓΓxml sitemap
ΝΣœΒΒγΜΑ
400-007-3860QQΉ…―·
2448209188ΈΔ–≈
ΈΔ–≈Ή…―·