Ή®“ΒΧαΙ©≤÷¥ΔΈοΝς…ΐΦΕΗΡ‘λΓΔΈό»ΥΑα‘ΥΜζΤς»Υ≤ζΤΖ
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860





ΚΥ–Ρ’Σ“ΣΘΚAGV»γΚΈ Βœ÷ΉΣœρ«ΐΕ·ΘΩ”–ΡΡ–©ΉΣœρ«ΐΕ·άύ–ΆΘΩ Βœ÷AGVΗΏ–ßΨΪΉΦΒΡ‘Υ––Θ§άκ≤ΜΩΣΒΦΚΫœΒΆ≥ΚΆΉΣœρ«ΐΕ·œΒΆ≥ΒΡΆ®ΝΠ–≠ΉςΓΘAGV‘Ύ»’≥Θ‘Υ δΙΐ≥Χ÷––η“Σ”ΟΉΣœρ«ΐΕ·ΉΑ÷Οά¥ΩΊ÷Τ‘ΥΕ·ΖΫ ΫΓΘ≤ΜΆ§...
AGV»γΚΈ Βœ÷ΉΣœρ«ΐΕ·ΘΩ
”–ΡΡ–©ΉΣœρ«ΐΕ·άύ–ΆΘΩ
Θ® ”ΤΒ÷ΤΉςLogTVΘ§ΉΣ‘ΊΈώ±ΊΉΔΟςά¥‘¥ΘΓΘ©
Βœ÷AGVΗΏ–ßΨΪΉΦΒΡ‘Υ––Θ§άκ≤ΜΩΣΒΦΚΫœΒΆ≥ΚΆΉΣœρ«ΐΕ·œΒΆ≥ΒΡΆ®ΝΠ–≠ΉςΓΘAGV‘Ύ»’≥Θ‘Υ δΙΐ≥Χ÷––η“Σ”ΟΉΣœρ«ΐΕ·ΉΑ÷Οά¥ΩΊ÷Τ‘ΥΕ·ΖΫ ΫΓΘ≤ΜΆ§ΒΡ≥Β¬÷ΫαΙΙΚΆ≤ΦΨ÷”–Ή≈≤ΜΆ§ΒΡΉΣœρΚΆΩΊ÷ΤΖΫ ΫΘ§Τδ≥–÷ΊΡήΝΠΓΔ‘Υ––ΨΪΕ»ΓΔΝιΜν–‘Β»“≤≤ΜΨΓœύΆ§Θ§Ε‘‘Υ––ΒΊΟφΜΖΨ≥“≤”–≤ΜΆ§ΒΡ“Σ«σΓΘΡ«Ο¥Θ§≤ΜΆ§ΒΡΉΣœρ«ΐΕ·ΉΑ÷Ο ”Ο”Ύ ≤Ο¥”Π”Ο≥ΓΨΑΘΩ”÷”–ΡΡ–©”≈»±ΒψΡΊΘΩœ¬Οφ–Γ±ύΨΆΗχ¥σΦ“Ϋι…ή“Μ–©≥ΘΦϊΒΡΉΣœρ«ΐΕ·άύ–ΆΓΘ
logclub
≥ΘΦϊΒΡAGVΉΣœρ«ΐΕ·άύ–Ά
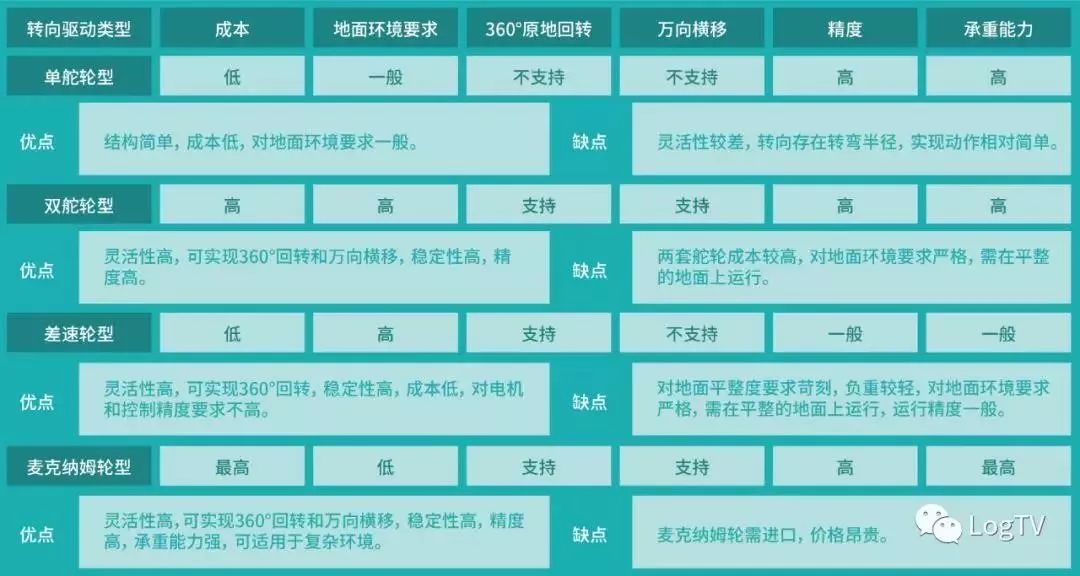
1ΓΔΒΞΕφ¬÷–Ά
ΒΞΕφ¬÷–ΆAGVΕύΈΣ»ΐ¬÷≥Β–ΆΘ®≤ΩΖ÷AGVΈΣΝΥΗϋ«ΩΒΡΈ»Ε®–‘ΜαΑ≤ΉΑΕύΗωΥφΕ·¬÷Θ§ΒΪΉΣœρ«ΐΕ·ΉΑ÷ΟΫωΈΣ“ΜΗωΕφ¬÷Θ©Θ§÷ς“Σ «“άΩΩAGV«Α≤ΩΒΡ“ΜΗωΫ¬÷αΉΣœρ≥Β¬÷ΉςΈΣ«ΐΕ·¬÷Θ§¥ν≈δΚσΝΫΗωΥφΕ·¬÷Θ§”…«Α¬÷ΩΊ÷ΤΉΣœρΓΘΒΞΕφ¬÷ΉΣœρ«ΐΕ·ΒΡ”≈Βψ «ΫαΙΙΦρΒΞΓΔ≥…±ΨΒΆΘ§”…”Ύ «ΒΞ¬÷«ΐΕ·Θ§Έό–ηΩΦ¬«ΒγΜζ≈δΚœΈ ΧβΘ§“ρ»ΐ¬÷ΫαΙΙΒΡΉΞΒΊ–‘ΚΟΘ§Ε‘ΒΊ±μΟφ“Σ«σ“ΜΑψΘ§ ”Ο”ΎΙψΖΚΒΡΜΖΨ≥ΚΆ≥ΓΚœΓΘ»±Βψ «ΝιΜν–‘Ϋœ≤νΘ§ΉΣœρ¥φ‘ΎΉΣΆδΑκΨΕΘ§Ρή Βœ÷ΒΡΕ·ΉςœύΕ‘ΦρΒΞΓΘ
”ΟAGVάύ–ΆΘΚ«Θ“ΐ ΫAGVΓΔ≤φ≥Β ΫAGVΓΘ
”Ο≥ΓΨΑΘΚ¥σΕ÷ΈΜΜθΈοΑα‘ΥΘ§ ”Ο≥ΓΨΑΙψΖΚΓΘ
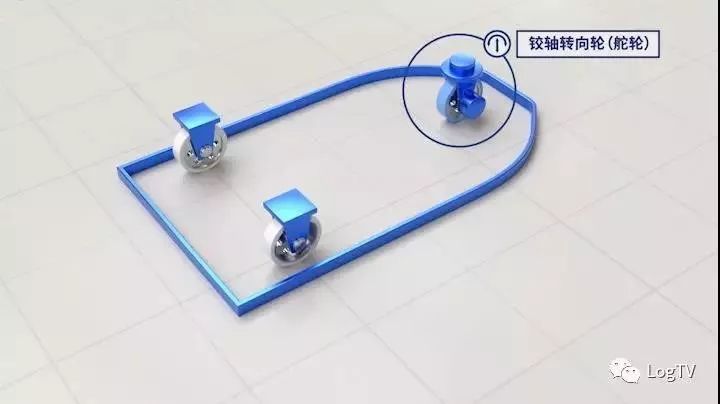
2ΓΔΥΪΕφ¬÷–Ά
ΥΪΕφ¬÷–ΆAGVΈΣΆρœρ–ΆAGVΘ§≥ΒΧε«ΑΚσΗςΑ≤ΉΑ“ΜΗωΕφ¬÷Θ§¥ν≈δΉσ”“ΝΫ≤ύΒΡΥφΕ·¬÷Θ§”…«ΑΚσΕφ¬÷ΩΊ÷ΤΉΣœρΓΘΥΪΕφ¬÷–ΆΉΣœρ«ΐΕ·ΒΡ”≈Βψ «Ω…“‘ Βœ÷360ΓψΜΊΉΣΙΠΡήΘ§“≤Ω…“‘ Βœ÷ΆρœρΚα“ΤΘ§ΝιΜν–‘ΗΏ«“ΨΏ”–ΨΪ»ΖΒΡ‘Υ––ΨΪΕ»ΓΘ»±Βψ «ΝΫΧΉΕφ¬÷≥…±ΨΫœΗΏΘ§Εχ«“AGV‘Υ––÷–Ψ≠≥Θ–η“ΣΝΫΗωΕφ¬÷≤νΕ·Θ§’βΕ‘ΒγΜζΚΆΩΊ÷ΤΨΪΕ»“Σ«σΫœΗΏΘ§Εχ«““ρΈΣΥΡ¬÷Μρ“‘…œΒΡ≥Β¬÷ΫαΙΙΘ§»ί“ΉΒΦ÷¬“Μ¬÷–ϋΩ’Εχ”Αœλ‘Υ––Θ§Υυ“‘Ε‘ΒΊΟφΤΫ’ϊΕ»“Σ«σ―œΗώΓΘΒΪ «”…”ΎΒΉ≤Ω¬÷Ή”ΗϋΕύΘ§ ήΝΠΗϋΨυΚβΘ§Υυ“‘’β÷÷«ΐΕ·ΖΫ ΫΒΡΈ»Ε®–‘±»ΒΞΕφ¬÷–ΆAGVΗϋΗΏΓΘ
”ΟAGVάύ–ΆΘΚ÷Ί‘Ί«±Ζϋ ΫAGVΜρΆΘ≥ΒΜζΤς»ΥΓΘ
”Ο≥ΓΨΑΘΚ¥σΕ÷ΈΜΒΡΈοΝœΑα‘ΥΘ§ ”Ο”ΎΤϊ≥Β÷Τ‘λΙΛ≥ßΓΔΆΘ≥Β≥ΓΒ»≥ΓΨΑΓΘ
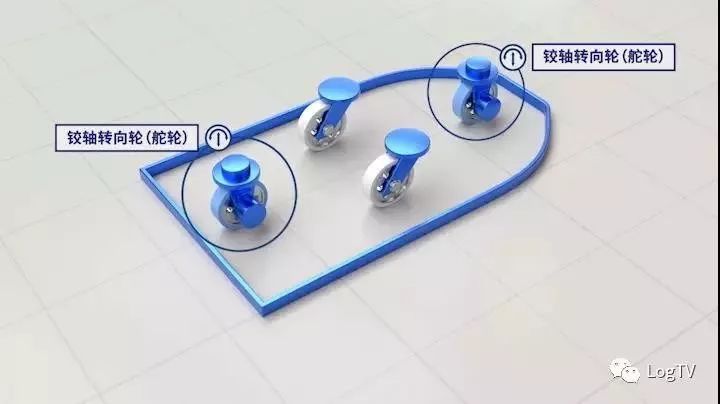
3ΓΔ≤νΥΌ¬÷–Ά
≤νΥΌ¬÷–ΆAGVΒΡΫαΙΙ «≥ΒΧεΉσ”“ΝΫ≤ύΑ≤ΉΑ≤νΥΌ¬÷ΉςΈΣ«ΐΕ·¬÷Θ§ΤδΥϊΈΣΥφΕ·¬÷Θ§”κΥΪΕφ¬÷–Ά≤ΜΆ§ΒΡ «Θ§≤νΥΌ¬÷≤Μ≈δ÷ΟΉΣœρΒγΜζΘ§“≤ΨΆ «ΥΒ«ΐΕ·¬÷±Ψ…μ≤Δ≤ΜΡή–ΐΉΣΘ§Εχ «Άξ»ΪΩΩΡΎΆβ«ΐΕ·¬÷÷°ΦδΒΡΥΌΕ»≤νά¥ Βœ÷ΉΣœρΓΘ’β÷÷«ΐΕ·ΖΫ ΫΒΡ”≈Βψ «ΝιΜν–‘ΗΏΘ§Ά§―υΩ… Βœ÷360ΓψΜΊΉΣΘ§ΒΪ”…”Ύ≤νΥΌ¬÷±Ψ…μ≤ΜΨΏ±ΗΉΣœρ–‘Θ§Υυ“‘’β÷÷«ΐΕ·άύ–ΆΒΡAGVΈόΖ®ΉωΒΫΆρœρΚα“ΤΓΘ¥ΥΆβΘ§≤νΥΌ¬÷Ε‘ΒγΜζΚΆΩΊ÷ΤΨΪΕ»“Σ«σ≤ΜΗΏΘ§“ρΕχ≥…±ΨœύΕ‘ΒΆΝ°Θ§Εχ»±Βψ «≤νΥΌ¬÷Ε‘ΒΊΟφΤΫ’ϊΕ»“Σ«σΩΝΩΧΘ§ΗΚ÷ΊΫœ«αΘ§“ΜΑψΗΚ‘Ί‘Ύ1Ε÷“‘œ¬Θ§ΈόΖ® ”ΠΨΪΕ»“Σ«σΙΐΗΏΒΡ≥ΓΚœΓΘ¥σΦ“ λœΛΒΡ―«¬μ―ΖKIVAΜζΤς»ΥΨΆ « Ι”Ο≤νΥΌ¬÷ΉΣœρ«ΐΕ·ΖΫ ΫΓΘ
”ΟAGVάύ–ΆΘΚ«±Ζϋ ΫAGVΓΘ
”Ο≥ΓΨΑΘΚ ”Ο”ΎΜΖΨ≥ΫœΚΟΒΡΒγ…ΧΓΔΝψ έΒ»≤÷Ωβ≥ΓΨΑΓΘ
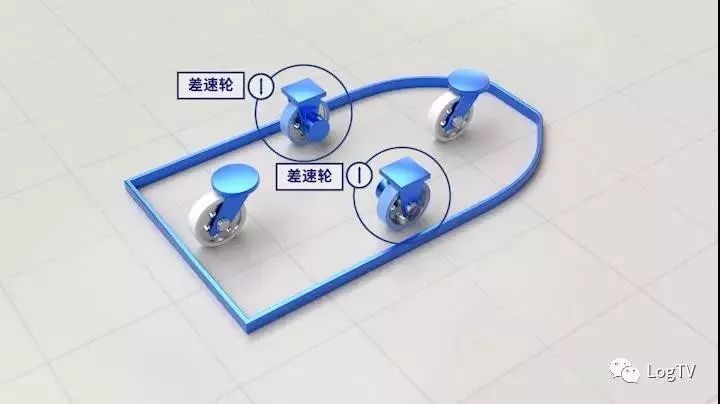
4ΓΔ¬σΩΥΡ…ΡΖ¬÷–Ά
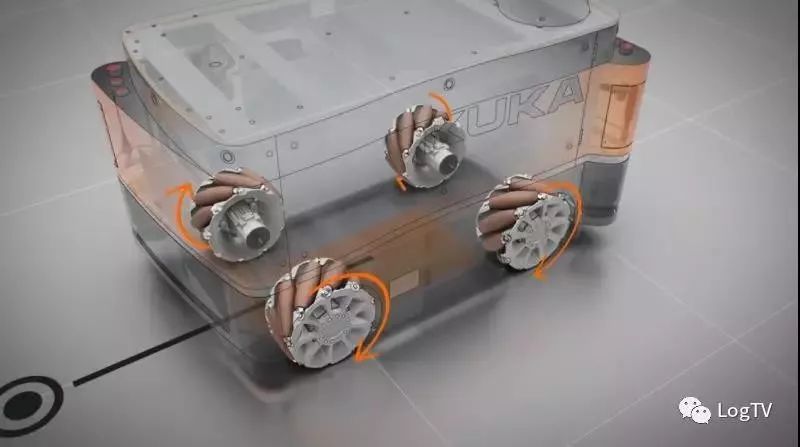
¬σΩΥΡ…ΡΖ¬÷…ηΦΤ–¬”±Θ§’β÷÷»ΪΖΫΈΜ“ΤΕ·ΖΫ Ϋ «Μυ”Ύ“ΜΗω”––μΕύΈΜ”ΎΜζ¬÷÷ή±ΏΒΡ¬÷÷αΒΡ÷––Ρ¬÷ΒΡ‘≠άμ…œΘ§’β–©≥…Ϋ«Ε»ΒΡ÷ή±Ώ¬÷÷αΑ―“Μ≤ΩΖ÷ΒΡΜζ¬÷ΉΣœρΝΠΉΣΜ·ΒΫ“ΜΗωΜζ¬÷Ζ®œρΝΠ…œΟφΓΘ“άΩΩΗςΉ‘Μζ¬÷ΒΡΖΫœρΚΆΥΌΕ»Θ§’β–©ΝΠΒΡΉν÷’Κœ≥…‘Ύ»ΈΚΈ“Σ«σΒΡΖΫœρ…œ≤ζ…ζ“ΜΗωΚœΝΠ ΗΝΩ¥”Εχ±Θ÷ΛΝΥ’βΗωΤΫΧ®‘ΎΉν÷’ΒΡΚœΝΠ ΗΝΩΒΡΖΫœρ…œΡήΉ‘”…ΒΊ“ΤΕ·Θ§Εχ≤ΜΗΡ±δΜζ¬÷Ή‘…μΒΡΖΫœρΓΘΦρΒΞά¥ΥΒΘ§ΨΆ «‘Ύ¬÷λ±…œΑ≤ΉΑ–±œρΙθΉ”Θ§Ά®Ιΐ–≠Ά§‘ΥΕ·“‘ Βœ÷“ΤΕ·Μρ–ΐΉΣΓΘ¬σΩΥΡ…ΡΖ¬÷ΒΡ”≈Βψ «ΨΏ”–10Ε÷“‘…œΒΡ‘Ί÷ΊΡήΝΠΘ§ΝιΜν–‘ΗΏΘ§Ω…“‘ Βœ÷360ΓψΜΊΉΣΙΠΡήΚΆΆρœρΚα“ΤΘ§Ηϋ Κœ‘ΎΗ¥‘”ΒΊ–Έ…œΒΡ‘ΥΕ·ΓΘ»±Βψ «¬σΩΥΡ…ΡΖ¬÷ τ”Ύ»πΒδ¬σΩΥΡ…ΡΖΙΪΥΨΒΡΉ®άϊΘ§÷ΜΡή¥”ΙζΆβΫχΩΎΘ§‘ΌΦ”…œ±Ψ…μ‘ΥΕ·άύ–ΆΒΡΗ¥‘”–‘Θ§“ρ¥ΥΦέΗώΑΚΙσΓΘ
”ΟAGVάύ–ΆΘΚ÷Ί‘Ί–Ά“ΤΕ·ΤΫΧ®ΓΔΜßΆβ“ΤΕ·ΜζΤς»Υ
”Ο≥ΓΨΑΘΚΖ…ΜζΓΔΗΏΧζΒ»…ζ≤ζ÷Τ‘λ≥ΓΨΑΓΔΜßΆβΜζΤς»Υ‘Υ δ≥ΓΨΑΓΘ
≤ΜΆ§ΒΡΉΣœρ«ΐΕ·άύ–ΆΕ‘”ΠΉ≈≤ΜΆ§≥ΓΨΑœ¬ΒΡ”Π”Ο–η«σΘ§–η“ΣΗυΨίΜΖΨ≥ΓΔΗΚ‘ΊΒ»“ρΥΊΫχ––ΉέΚœΤάΙά―ΓΕ®ΓΘΗυΨί”Π”Ο≥ΓΨΑΒΡΜΖΨ≥–η“ΣΘ§―ÔϹνΚœ ΒΡΉΣœρ«ΐΕ·ΖΫ ΫΘ§÷Μ”–’β―υ≤≈Ρή±Θ÷Λ≤ΜΆ§Ής“Β≥ΓΨΑœ¬AGV‘Υ––ΒΡΩ…ΩΩ–‘ΓΔΈ»Ε®–‘ΚΆΨΪ»Ζ–‘ΓΘ
…œ“ΜΧθΘΚAGV–Γ≥ΒΦΛΙβΒΦΚΫΙΛΉς‘≠άμ”≈»±Βψ œ¬“ΜΧθΘΚAGV–Γ≥ΒΒΡ»’≥Θ±Θ―χΝς≥ΧΚΆΉΔ“β ¬œν
ΒγΜΑΘΚ0755-29851810
¥Ϊ’φΘΚ0755-27307147
Q QΘΚ2448209188
” œδΘΚzfj@okagv.com
ΒΊ÷ΖΘΚ…νέΎ –±ΠΑ≤«χΗΘΚΘΫ÷Βά¥σ―σ¬Ζ÷–ΝΗΗΘΑ≤ΜζΤς»ΥΩΤΦΦ‘Α14ΕΑ

Copyright © 2012-2023 …νέΎ –≈Ζνχ÷«ΡήΜζΤς»ΥΙ…Ζί”–œόΙΪΥΨ Αφ»®Υυ”–ΓΓ ‘ΝICP±Η 19115608 Κ≈ΓΓxml sitemap
ΝΣœΒΒγΜΑ
400-007-3860QQΉ…―·
2448209188ΈΔ–≈
ΈΔ–≈Ή…―·