Ή®“ΒΧαΙ©≤÷¥ΔΈοΝς…ΐΦΕΗΡ‘λΓΔΈό»ΥΑα‘ΥΜζΤς»Υ≤ζΤΖ
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860





¬÷άΣΒΦΚΫ
¬÷άΣΒΦΚΫ «ΡΩ«ΑAGVΉνΈΣœ»ΫχΒΡΒΦΚΫΦΦ θΘ§ΗΟΦΦ θάϊ”ΟΕΰΈ§ΦΛΙβ…®Οη“«Ε‘œ÷≥ΓΜΖΨ≥Ϋχ––≤βΝΩΓΔ―ßœΑΘ§≤ΔΜφ÷ΤΒΦΚΫΜΖΨ≥Θ§»ΜΚσΫχ––Εύ…Ό≤βΝΩ―ßœΑΘ§–ό’ΐΒΊΆΦΫχΕχ Βœ÷¬÷άΣΒΦΚΫΙΠΡήΓΘ
¬÷άΣΒΦΚΫ
άϊ”ΟΉ‘»ΜΜΖΨ≥Θ®«Ϋ±ΎΓΔ÷υΉ”“‘ΦΑΤδΥϋΙΧΕ®ΈοΧεΘ©Ϋχ––Ή‘”…≤βΨύΒΦΚΫΗυΨίΜΖΨ≥≤βΝΩΫαΙϊΗϋ–¬ΈΜ÷ΟΓΘ
¬÷άΣΒΦΚΫ‘≠άμ
¬÷άΣΒΦΚΫΉΣΆδ Βœ÷‘≠άμ
¬÷άΣΒΦΚΫΜΖΨ≥≤βΝΩ Βœ÷
ΡΩ«Α¬÷άΣΒΦΚΫ¥ΪΗ–Τςάύ–ΆΘΚ
1ΓΔ≤…”ΟΨΏ”–≤βΝΩΙΠΡήΒΡΑ≤»ΪΦΛΙβ…®Οη“«ΓΘ
2ΓΔ≤…”ΟΨΏ”–≤βΝΩΙΠΡήΒΡΦΛΙβ…®Οη“«
¬÷άΣΒΦΚΫ¥ΪΗ–ΤςΑ≤ΉΑΖ÷άύΘΚ
ΜώΒΟΉψΙΜ¥σΒΡ ”“Α «¬÷άΣΒΦΚΫΒΡ±Ί“ΣΧθΦΰΘΚ
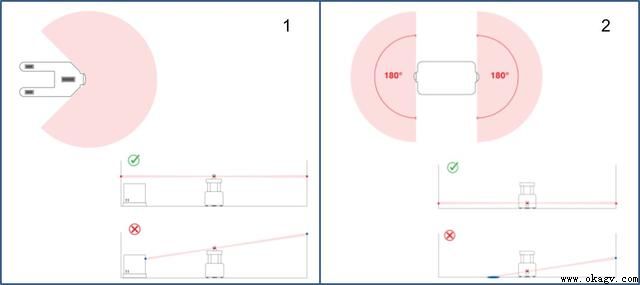
ΫΪΒΞΗω¥ΪΗ–ΤςΑ≤ΉΑ‘ΎΗΏ¥ΠΘ§“‘ΜώΒΟ270Ε» ”Ϋ«ΓΘ
Α≤ΉΑΝΫΗω¥ΪΗ–ΤςΘ§“‘ΜώΒΟ≥§Ιΐ270Ε»ΒΡ ”Ϋ«ΓΘ»Ζ±ΘΥ°ΤΫΕ‘ΤκΓΘ
¬÷άΣΒΦΚΫΑ≤ΉΑΖΫ Ϋ
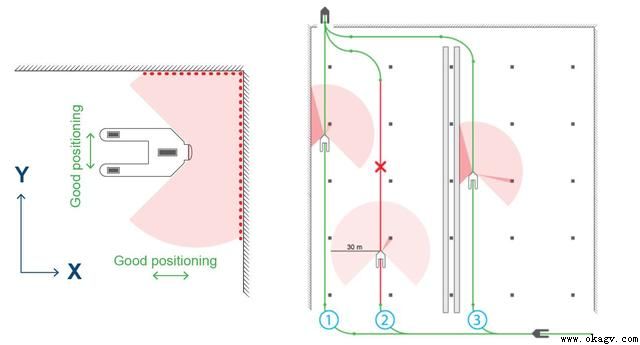
ΜθΈο”Π…η÷Ο‘Ύ Β±ΖΕΈßΡΎΘ®±»»γΉν¥σΨύάκ 30 ΟΉΘ§‘ΎΩ…–––‘ΤάΙά ±Θ§≤…”Ο Ι”Ο 20 ΟΉΘ© “‘ΦΑ‘ΎΝΫ±Ώ”κ«ΑΟφΘ§“‘ Βœ÷Άξ’ϊΒΡΈΜ÷ΟΗϋ–¬ Θ§’βΒψΚή÷Ί“ΣΓΘ
¬÷άΣΒΦΚΫAGV¬ΖΨΕ…η÷Ο
ΜΖΨ≥Ε·Χ§±δΜ·
‘Λ÷Σ¥ΪΗ–Τς ”Ϋ«Μα“ρ‘±ΙΛΓΔ≥ΒΝΨΓΔΟ≈”κ…η±Η“ΤΕ·ΕχΝΌ ±“ΤΕ·Θ§’β‘Ύ“ΜΕ®≥ΧΕ»…œ «Ω…“‘Ϋ” ήΒΡΓΘ…η±ΗΓΔ≥ΒΝΨΓΔΆ–≈Χ”κΤδΥϋΙΧΧε“Σ‘Ύ≥ΒΝΨ–– Μ ±±Θ≥÷Ψ≤÷ΙΘ§’βΟφΝΌΒΡΧτ’ΫΗϋ¥σΓΘ
÷Ν…Ό 50% ΒΡ¥ΪΗ–ΤςΕΝ ΐά¥Ή‘ Β≤βΆΦ÷–ΒΡΈοΧεΓΘ

¬÷άΣΒΦΚΫΜΖΨ≥Ε·Χ§ΤάΙά
¬÷άΣΒΦΚΫ”≈ΒψΘΚ
1ΓΔ≤Μ–η“ΣΖ¥…δΤςΜρΤδΥϋ»ΥΙΛΒΊ±ξ
2ΓΔΫΒΒΆΑ≤ΉΑ≥…±Ψ
3ΓΔΦθ…ΌΈ§ΜΛΙΛΉς
4ΓΔΦΛΙβΒΦΚΫΧφ¥ζΖΫΑΗ
…œ“ΜΧθΘΚΜλΚœΒΦΚΫ”κΙβ―ßΒΦΚΫΦΦ θ œ¬“ΜΧθΘΚΒγ¥≈ΒΦΚΫagvΒΡ”≈»±Βψ
ΒγΜΑΘΚ0755-29851810
¥Ϊ’φΘΚ0755-27307147
Q QΘΚ2448209188
” œδΘΚzfj@okagv.com
ΒΊ÷ΖΘΚ…νέΎ –±ΠΑ≤«χΗΘΚΘΫ÷Βά¥σ―σ¬Ζ÷–ΝΗΗΘΑ≤ΜζΤς»ΥΩΤΦΦ‘Α14ΕΑ

Copyright © 2012-2023 …νέΎ –≈Ζνχ÷«ΡήΜζΤς»ΥΙ…Ζί”–œόΙΪΥΨ Αφ»®Υυ”–ΓΓ ‘ΝICP±Η 19115608 Κ≈ΓΓxml sitemap
ΝΣœΒΒγΜΑ
400-007-3860QQΉ…―·
2448209188ΈΔ–≈
ΈΔ–≈Ή…―·