Ή®“ΒΧαΙ©≤÷¥ΔΈοΝς…ΐΦΕΗΡ‘λΓΔΈό»ΥΑα‘ΥΜζΤς»Υ≤ζΤΖ
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860





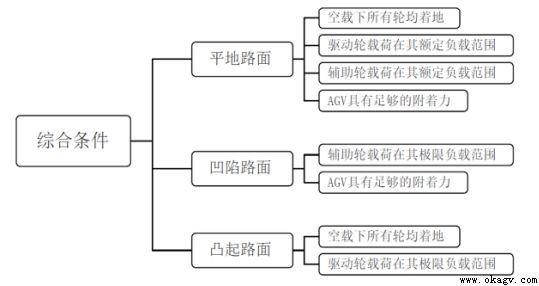
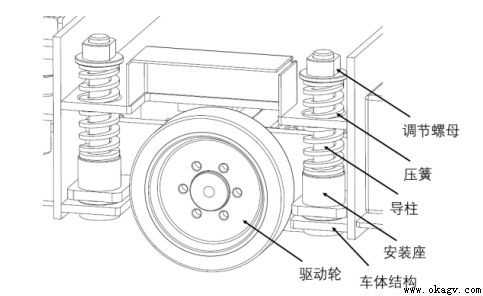
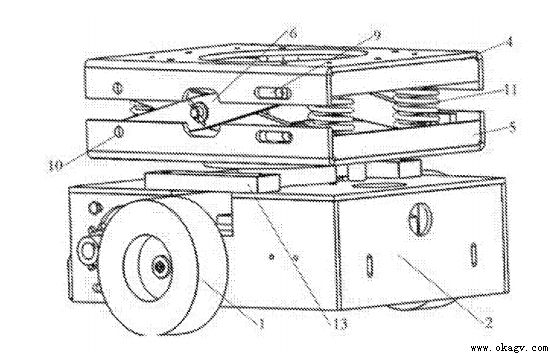
ΥφΉ≈Έ“ΙζΒΡ÷Τ‘λ“ΒΉΣ–Ά…ΐΦΕ≤ΫΖΞΒΡΦ”ΩλΘ§Μζ–ΒΉ‘Ε·Μ·¥ζΧφ»ΥΙΛάΆΕ·ΝΠ“≤≥…ΝΥΒ±ΫώΒΡ÷ΊΒψΓΘœύ±»“‘«ΑΘ§»γΫώΒΡΈοΝςΦΑΈοΝœΑα‘Υ–Έ Ϋ“―÷πΫΞΒΊ”…¥ΪΆ≥»ΥΙΛΑα‘ΥΉΣΈΣ÷«ΡήΉ‘Ε·Αα‘Υ–Έ ΫΘ§AGV “― «ΡΩ«ΑΙζΡΎ÷Τ‘λ“Β”Π”ΟΉνΙψΖΚΒΡΑα‘ΥΜζΤς»Υ÷°“ΜΓΘ
AGVΉν‘γ‘¥”Ύ≤÷¥ΔΈοΝςΘ§Τδ÷–ΒΡ”Π”ΟΜΖΨ≥ΧθΦΰ±»ΫœΝΦΚΟΘ§≤Δ«“AGVΒΡ”Π”Ο≥ΓΒΊ“≤”–œύΙΊΒΡ±ξΉΦΕ®“εΓΘΥφΉ≈÷«ΡήΈοΝςΒΡΖ…ΥΌΖΔ’ΙΘ§AGVœ÷“―…φΉψ÷Τ‘λ“ΒΓΔΗέΩΎΑα‘ΥΓΔΑ≤Ζά―≤ΦλΒ»Νλ”ρΘ§”Π”ΟΒΡΝλ”ρΖΕΈßά©¥σ“βΈΕΉ≈‘Υ––≥ΓΨΑΒΡΗ¥‘”Ε»Χα…ΐΘ§“ρ¥ΥΘ§AGVΒΡ ”Π–‘Ρή“≤”ΠΒ±ΧαΗΏΓΘΉςΈΣAGVΒΡ ”ΠΫαΙΙ÷°“ΜΒΡΦθ’πΗΓΕ·ΫαΙΙΘ§ΡΩ«ΑΘ§ΤδΫαΙΙ–Έ ΫΖ±ΕύΘ§Ε‘”Ύ≤ΜΆ§ΒΡ AGV ΒΉ≈Χ–Έ ΫΓΔ≥–‘ΊΝΩΘ§Φθ’πΗΓΕ·ΫαΙΙ“≤≤ΜΆ§ΓΘ±ΨΈΡΆ®ΙΐΝ–ΨΌΡΩ«ΑAGV ≥ΘΦϊΒΡΦθ’πΗΓΕ·ΫαΙΙ–Έ ΫΘ§Φ”“‘―–ΨΩΖ÷ΈωΤδΦθ’πΒΡΧΊ–‘Θ§“‘Ε‘AGV ΒΡ–ϋΙ“ΗΓΕ·œΒΆ≥…ηΦΤΧαΙ©ΧΊ–‘Ζ÷Έω“‘ΦΑάμ¬έ≤ΈΩΦΓΘ
¥σΧε…œά¥ΥΒΘ§AGVΒΡΦθ’πΗΓΕ·ΫαΙΙ «“Σ ΙAGVΜώΒΟΩ…“‘‘ΎΗ¥‘”¬ΖΟφ…œ–– ΜΒΡ–‘ΡήΘ§ΤδΨΏΧεΖΔΜ”ΒΡΉς”ΟΘΚ
(1)¬÷œΒΙ≤Ά§Ή≈ΒΊΓΘ‘ΎAGVΨΏ”–Εύ¬÷ΒΡ≤ΦΨ÷¬÷œΒ÷–Θ§ΈΣ±Θ÷Λ«ΐΕ·¬÷Ή≈ΒΊΘ§“ΜΑψΒΡœκΖ® «ΫΪ«ΐΕ·ΒΞ‘ΣΑ≤ΉΑΒΟ±»ΤδΥϊΗ®÷ζ¬÷ΆΙ≥ωά¥“‘±Θ÷Λ«ΐΕ·¬÷ΒΡ Ήœ»Ή≈ΒΊΓΘΒΪ»γ¥Υ“Μά¥ΓΘΗ®÷ζ¬÷ ΒΦ ≤ΔΟΜ”–”κΒΊΟφΧυΫτΘ§ΒΦ÷¬ΗϋΕύΒΡ‘ΊΚ… ©Φ”ΒΫ«ΐΕ·ΒΞ‘Σ…œΘ§ΫΒΒΆΝΥAGVΒΡ≥–‘ΊΡήΝΠΒΡΆ§ ±Θ§AGVΒΡ–– ΜΈ»Ε®–‘“≤ΜαΫΒΒΆΓΘ
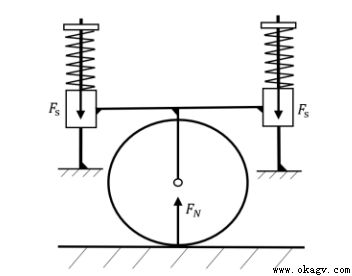
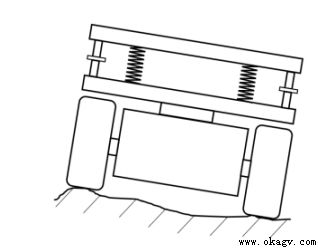
Ρ«Ο¥Θ§‘Ύ…œ ωΒΡΜυ¥Γ…œΘ§Φθ’πΗΓΕ·ΫαΙΙ Ι«ΐΕ·ΒΞ‘ΣΨΏ”–…œœ¬―ΙΥθΒΡΉ‘”…Ε»ΓΘ»γΆΦ1Υυ ΨΘ§‘Ύ«ΐΕ·¬÷ΆβΆΙœ¬Θ§Ά®ΙΐAGVΒΡΉ‘÷ΊΫΪ«ΐΕ·¬÷―Ι÷Ν”κΗ®÷ζ¬÷ΤΫΤκΓΘΆ®ΙΐΦθ’πΗΓΕ·ΫαΙΙά¥ Βœ÷Εύ¬÷Ι≤Ά§Ή≈ΒΊΈ ΧβΘ§±Θ÷ΛΝΥAGVΒΡ«ΐΕ·ΝΠΆβΘ§Η®÷ζ¬÷ΒΡΉ≈ΒΊ“≤Ζ÷ΒΘΝΥ“Μ≤ΩΖ÷ΒΡ≥–‘ΊΓΘ
(2) ”Π≤ΜΤΫ¬ΖΟφΓΘ‘ΎAGVΒΡΉς“ΒΜΖΨ≥÷–Θ§¬ΖΟφΒΡ≤ΜΤΫΜαΒΦ÷¬«ΐΕ·¬÷–ϋΩ’“‘÷¬ ΙAGV ß»ΞΕ·ΝΠΜρ±ΜΕΞΤπΓΘΦθ’πΗΓΕ·ΫαΙΙ÷–ΒΡΒ·Μ…Μα Ι«ΐΕ·¬÷ Φ÷’”κΒΊΟφΧυΫτΘ§”ωΒΫΆΙΤπ¬ΖΟφ ±Θ§”…”Ύ«ΐΕ·ΒΞ‘ΣΒΡΗΓΕ·–‘“‘ΦΑΒ·Μ…ΒΡΩ…―ΙΥθ–‘Θ§Ω…±ήΟβ«ΐΕ·ΒΞ‘Σ¥χΕ·AGV’ϊΧε±ΜΕΞΤπΓΘΒ·Μ…ΒΡΖ¥Ής”ΟΝΠ Ι«ΐΕ·¬÷ Φ÷’”κΒΊΟφΧυΫτΘ§ΒΊΟφ“≤ ±ΩΧΧαΙ©«ΐΕ·¬÷÷ß≥–ΝΠ“‘±Θ÷ΛΨΏ”–ΉψΙΜΒΡΗΫΉ≈ΝΠΘ§±Θ÷ΛΝΥAGV≤ΜΜα“ρ¬ΖΟφ≤ΜΤΫΕχ ß»ΞΕ·ΝΠΓΘ
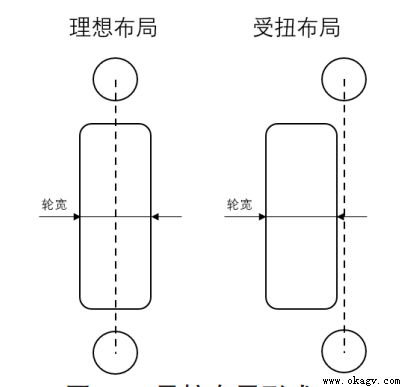
ΆΦ1 AGVΉ‘÷ΊΫΪ«ΐΕ·¬÷―Ι÷ΝΤΫΤκ
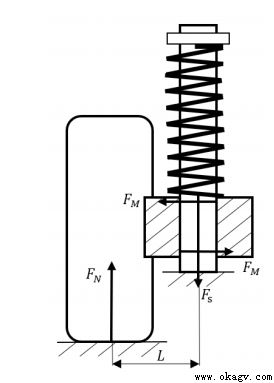
ΆΦ2 ΗΓΕ·ΫαΙΙΒΡ¬ΖΟφ ”Π–‘
(3)ΦθΜΚ≥εΜςΝΠΓΘ¬ΖΟφΒΡ≤ΜΤΫ“‘ΦΑ––ΨΕΖΫœρΒΡ’œΑ≠ΈοΜαΕ‘«ΐΕ·ΒΞ‘Σ‘λ≥…≥εΜςΘ§ΕχΦθ’πΒ·Μ…ΫΪΤδ≥εΜςΈϋ ’Θ§”––ßΜΚΫβ≥εΜςΝΠΕ‘«ΐΕ·ΒΞ‘ΣΒΡΤΤΜΒΘ§―”≥Λ«ΐΕ·ΒΞ‘ΣΒΡ Ι”Ο ΌΟϋΓΘ
ΈΣΝΥ±Θ÷ΛΦθ’πΗΓΕ·ΫαΙΙΡήΖΔΜ”…œ ωΒΡΨΏΧεΙΠΡήΘ§ΤδΫαΙΙΒΡ…ηΦΤ”ΠΒ±¬ζΉψ“ΜΕ®ΒΡΧθΦΰΘ§Ζώ‘ρΘ§Μα≥ωœ÷ΗΓΕ·Η’Ε»Ιΐ¥σΜρΙΐ–ΓΥυ“ΐΤπΒΡΙΠΡή ß–ßΓΘ
œ÷ΦΌΕ®Φθ’πΒ·Μ…ΒΡΥυ–ηΗ’Ε»ΈΣkΓΔ¬ΖΟφΤπΖϋ≤ΜΤΫΕ»ΈΣΓάΠΡΓΔ«ΐΕ·¬÷Α≤ΉΑΆβΆΙΝΩΈΣΠΥΓΘΡ«Ο¥Θ§‘ΎΖ÷ΈωΦθ’πΗΓΕ·ΫαΙΙ÷–Θ§”ΠΒ±Α―AGVΒΡΉς“Β¬ΖΟφΉ¥ΩωΖ÷ΈΣ»ΐ÷÷ά¥
ΨΏΧεΖ÷ΈωΘΚ
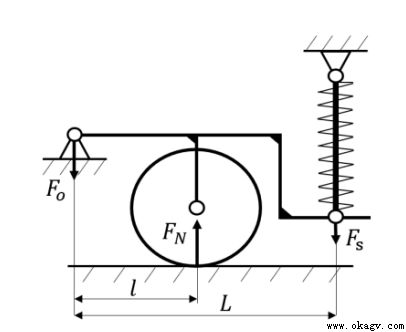
(1)ΤΫΒΊ¬ΖΟφΓΘΤΫΒΊ¬ΖΟφ «AGVΉς“Β ±ΦδΉν≥ΛΒΡΙΛΩωΘ§¥Υ ±Θ§AGV”ΠΗΟ±Θ÷ΛΥυ”–¬÷Ή”Ι≤Ά§Ή≈ΒΊΓΔΗς¬÷ΒΡ≥–‘Ί‘ΎΤδΕνΕ®≥–‘ΊΖΕΈßΡΎΓΔ«ΐΕ·¬÷ΒΡΗΫΉ≈ΝΠΉψ“‘Ζά÷Ι¬÷Ή”¥ρΜ§ΓΘ
Β±AGVΥυ¥ΠΤΫΒΊ¬ΖΟφ ±Θ§Φ¥«ΐΕ·¬÷”κΤδΥϊΗ®÷ζ¬÷¥Π”ΎΤΫΤκΉ¥Χ§Θ§Ρ«Ο¥Θ§¥Υ ±ΒΡΦθ’πΒ·Μ…œύΒ±”Ύ±Μ―ΙΥθΝΥΆβΆΙΝΩΠΥΘ§¥Υ ±Θ§«ΐΕ·¬÷”κΒΊΟφΒΡΉς”ΟΝΠFN1ΈΣΘΚ
FN1 = (ΠΛ+ΠΥ)ΓΛnk
Ϋ÷–Θ§ΠΛΈΣΒ·Μ…ΒΡΑ≤ΉΑ‘Λ―ΙΝΩΘΜn ΈΣΒ·Μ… ΐΝΩΓΘ
‘Ύ≥–‘Ί…œ–κ¬ζΉψΘΚ
FN1 Γή Fmax1
FN2 Γή Fmax2
FN2 = f(FN1,G)
Ϋ÷–Θ§Fmax1«ΐΕ·¬÷ΒΡΕνΕ®ΗΚ‘ΊΘΜFN2ΤΫ¬Ζ…œΗ®÷ζ¬÷ΒΡ÷ß≥–ΝΠΘΜFmax2ΈΣΗ®÷ζ¬÷ΒΡΕνΕ®ΗΚ‘ΊΘΜGΈΣAGVΙΛΉς
’ϊΧε÷ΊΝΩΘΜf(FN1,G)ΙΊ”ΎFN1ΚΆGΒΡΖΫ≥Χ ΫΘ§¬÷œΒΫαΙΙΒΡ≤ΜΆ§Θ§ΤδΦΤΥψΖΫ≥Χ“≤≤Μ“Μ―υΓΘ
‘Ύ«ΐΕ·¬÷ΗΫΉ≈ΝΠ Ff…œ–κ¬ζΉψΘΚ
Ff ΘΨ Fq
Ff = FN1ΓΛΠΧ1
Fq = GΓΛΠΧ2
Ϋ÷–Θ§FqΈΣAGV––ΉΏΥυ–η«Θ“ΐΝΠΘΜΠΧ1ΈΣ«ΐΕ·¬÷”κΒΊΟφΒΡΗΫΉ≈œΒ ΐΘΜΠΧ2ΈΣAGVΒΡΙωΕ·ΡΠ≤ΝœΒ ΐΓΘ
(2)ΑΦœί¬ΖΟφΓΘ‘ΎΑΦœί¬ΖΟφ÷–Θ§ΈΣ Ι«ΐΕ·¬÷ΧυΫτΒΊΟφΘ§Φθ’πΒ·Μ…ΜαΫΪ«ΐΕ·¬÷ΕΞΫτΒΊΟφΘ§¥Υ ±Θ§Β·Μ…œύ±»ΤΫΒΊ¬ΖΟφ ±–Έ±δΝΩ“‘ΦΑ«ΐΕ·¬÷ΒΡ―ΙΝΠΨυ±δ–ΓΘ§ΕχΤδΥϊΗ®÷ζ¬÷ΒΡ―ΙΝΠ±δ¥σΓΘ
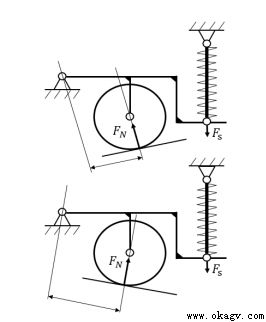
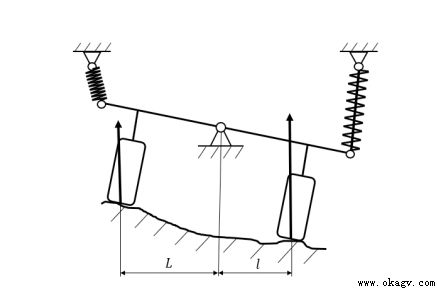
¥”ΆΦ 3 ΒΡΦΗΚΈΙΊœΒΩ…÷ΣΘ§Β± AGV Υυ¥ΠΑΦœί¬ΖΟφ ±Θ§¥Υ ±Θ§Φθ’πΒ·Μ…ΒΡ―ΙΥθΝΩ ΒΦ «ΆβΆΙΝΩ”κ¬ΖΟφ≤ΜΤΫΕ»÷°≤νΘ§”…¥ΥΩ…ΦϊΘ§«ΐΕ·¬÷ΒΡΆβΆΙΝΩ±Ί–κ¥σ”Ύ¬ΖΟφ≤ΜΤΫΕ»Θ§
Ζώ‘ρΘ§‘ΎΑΦœί¬ΖΟφ ±«ΐΕ·¬÷Μα¥Π”Ύ–ϋΩ’Ή¥Χ§ΓΘ
»γΙϊ±Θ÷ΛΝΥAGV‘ΎΤΫΒΊ÷–Υυ”–¬÷Ή”Ι≤Ά§Ή≈ΒΊ«“«ΐΕ·¬÷ΒΡΆβΆΙΝΩ¥σ”Ύ¬ΖΟφ≤ΜΤΫΕ»Θ§‘ρAGV¥Π”ΎΑΦœί¬ΖΟφ ±Υυ”–¬÷Ή”“≤±ΊΕ®Ι≤Ά§Ή≈ΒΊΘ§“ρ¥ΥΘ§–η±Θ÷ΛΒΡ «Ης¬÷ΒΡ≥–‘ΊΤδ≥–‘ΊΖΕΈßΡΎΓΔ«ΐΕ·¬÷ΒΡΗΫΉ≈ΝΠΉψ“‘Ζά÷Ι¬÷Ή”¥ρΜ§ΓΘ
¥Υ ±Θ§«ΐΕ·¬÷”κΒΊΟφΒΡΉς”ΟΝΠFN1'ΈΣΘΚ
FN1 = (ΠΛ+ΠΥ-ΠΡ)ΓΛnk
ΠΥ > ΠΡ
ΆΦ3 ΑΦœί¬ΖΟφ ±ΒΡΒ·Μ…–Έ±δΝΩ
œύ±»ΤΫΒΊ¬ΖΟφΚΆΑΦœί¬ΖΟφΘ§Β·Μ…–Έ±δΝΩΦθ…ΌΘ§‘ρ«ΐΕ·¬÷ΗΚ‘Ί±δ–ΓΕχΗ®÷ζ¬÷ΗΚ‘Ί±δ¥σΓΘ”…”ΎΑΦœί¬ΖΟφΒΡΙΛΩωΤΒ¬ ΒΆ”ΎΤΫΒΊ¬ΖΟφΘ§Φ¥Η®÷ζ¬÷ΒΡ¥σΗΚ‘ΊΙΛΉς ±ΦδΫœΕΧΘ§
¥Υ ±Θ§Η®÷ζ¬÷ΗΚ‘Ί¥Π”ΎΤδΦΪœόΗΚ‘ΊΖΕΈßΡΎΦ¥Ω…Θ®»γΗΟΙΛΩωΤΒ¬ ΫœΗΏΘ§‘ρ–κ¥Π”ΎΕνΕ®ΗΚ‘ΊΖΕΈßΡΎΘ©Θ§‘ρΦθ’πΗΓΕ·ΫαΙΙ‘Ύ≥–‘Ί…œ–κ¬ζΉψΘΚ
FN1' Γή Fmax1'
FN2' Γή Fmax2'
FN2' = f(FN1',G)
Ϋ÷–Θ§FN2'ΈΣΑΦœί¬ΖΟφ…œΗ®÷ζ¬÷ΒΡ÷ß≥–ΝΠ;Fmax2'ΈΣΗ®÷ζ¬÷ΒΡΦΪœόΗΚ‘Ί;f(FN1',G)ΙΊ”ΎFN1'ΚΆGΒΡΖΫ≥Χ ΫΘ§¬÷œΒΫαΙΙΒΡ≤ΜΆ§Θ§ΤδΦΤΥψΖΫ≥Χ“≤≤Μ“Μ―υΓΘ
‘Ύ«ΐΕ·¬÷ΗΫΉ≈ΝΠFf'…œ–κ¬ζΉψΘΚ
Ff' > Fq
Ff' = FN1'ΓΛΠΧ1
(3)ΆΙΤπ¬ΖΟφΓΘ‘ΎΆΙΤπ¬ΖΟφ÷–Θ§”…”Ύ¬ΖΟφΆβΆΙΫΪ«ΐΕ·ΒΞ‘ΣΒΡΦθ’πΒ·Μ…―ΙΥθΘ§άμ¬έ…œΦθ’πΒ·Μ…ΒΡ―ΙΥθΝΩΜα¥σ”ΎΤΫΒΊ ±ΒΡΒ·Μ…―ΙΥθΝΩΓΘΒΪ»γΙϊΒ·Μ…‘Ύ―ΙΥθΙΐ≥ΧΒΡΒ·ΝΠ“―Ψ≠Ήψ“‘÷ß≥– AGV ’ϊΧεΒΡ÷ΊΝΩ ±Θ§Ρ«Ο¥Θ§Β·Μ…≤Μ‘Ό―ΙΥθΘ§Εχ «»γΆ§Η’–‘Ν§Ϋ”“ΜΑψΫΪAGV’ϊΧεΕΞΤπΓΘ»γ…œ ωΖ÷ΈωΘ§¥Υ ±Θ§Β·Μ…―ΙΥθΝΩΉν¥σΘ§“ρ¥Υ«ΐΕ·¬÷ΒΡΗΚ‘ΊΉν¥σΓΘ
ΈΣ±Θ÷ΛΥυ”–¬÷Ή”Ι≤Ά§Ή≈ΒΊΘ§”Π±Θ÷ΛΆΙΤπ―ΙΥθΒ·Μ… ±Θ§Β·Μ…ΒΡΒ·ΝΠ≤ΜΜαΫΪAGV’ϊΧε÷ß≥–Τπά¥Θ§‘ρ«ΐΕ·¬÷”κΒΊΟφΒΡΉς”ΟΝΠFN1"–κ¬ζΉψΘΚ
FN1" = (ΠΛ+ΠΥ+ΠΡ)ΓΛnk
2FN1" < G [caption id="attachment_478" align="aligncenter" width="382"]
ΆΦ4 ΆΙΤπ¬ΖΟφ ±ΒΡΒ·Μ…–Έ±δΝΩ[/caption]
ΆΙΤπ¬ΖΟφ÷–Θ§¥Υ ±Θ§«ΐΕ·¬÷ΗΚ‘ΊΉν¥σΘ§Η®÷ζ¬÷ΒΡΗΚ‘ΊΉν–ΓΓΘ”…”ΎΆΙΤπ¬ΖΟφΒΡΙΛΩωΤΒ¬ “ά»ΜΒΆ”ΎΤΫΒΊ¬ΖΟφΘ§«ΐΕ·¬÷ΫωΕΧ ±Φδ≥– ή¥σΗΚ‘ΊΘ§Υυ≥–‘ΊΒΡΗΚ‘Ί¥Π”ΎΤδΦΪœόΗΚ‘ΊΖΕΈßΡΎΦ¥Ω…ΓΘ‘ρΦθ’πΗΓΕ·ΫαΙΙ‘Ύ≥–‘Ί…œ–κ¬ζΉψΘΚ
FN1" Γή Fmax1'
FN2" Γή Fmax2'
FN2" = f(FN1",G)
Ϋ÷–Θ§Fmax1'ΈΣ«ΐΕ·¬÷ΒΡΦΪœόΗΚ‘Ί;FN2"ΆΙΤπ¬ΖΟφ
…œΗ®÷ζ¬÷ΒΡ÷ß≥–ΝΠ;f(FN1",G)ΙΊ”ΎFN1"ΚΆGΒΡΖΫ≥Χ ΫΘ§¬÷œΒΫαΙΙΒΡ≤ΜΆ§Θ§ΤδΦΤΥψΖΫ≥Χ“≤≤Μ“Μ―υΓΘ
(4)ΉέΚœΧθΦΰΓΘΉέΚœ…œ ω(1)ΓΔ(2)ΓΔ(3)3÷÷ΙΛΩωœ¬ΒΡΧθΦΰΘ§Φθ’πΗΓΕ·ΫαΙΙ–η“Σ¬ζΉψΒΡΉέΚœΧθΦΰ»γœ¬ΘΚ
Ε‘”Ύ…œ ωΒΡΉέΚœΧθΦΰΘ§ΟΩœνΧθΦΰΕΦΩ…»γ…œ ωΖ÷ΈωΙΙΫ®ΤπœύΙΊΒ·Μ…Η’Ε»ΒΡΖΫ≥Χ Ϋ“‘ΦΑΖΕΈß≤ΜΒ» ΫΘ§Ά®ΙΐΗ’Ε»ΒΡΕύΗωΖΕΈßΧθΦΰΘ§Ω…»ΖΕ®≥ωΒ·Μ…Η’Ε»‘Ύ¬ζΉψΥυ”–ΧθΦΰ
œ¬ΒΡ»Γ÷ΒΖΕΈßΓΘΡ«Ο¥Θ§‘Ύ”Ο”ΎΦθ’πΗΓΕ·ΫαΙΙΒΡΒ·Μ…ΒΡΗ’Ε»”ΠΒ±¥Π”ΎΗΟ»Γ÷ΒΖΕΈßΡΎΓΘ
ΆΦ5 Φθ’πΗΓΕ·ΫαΙΙΒΡΉέΚœΧθΦΰ
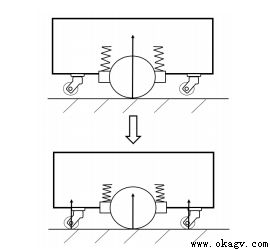
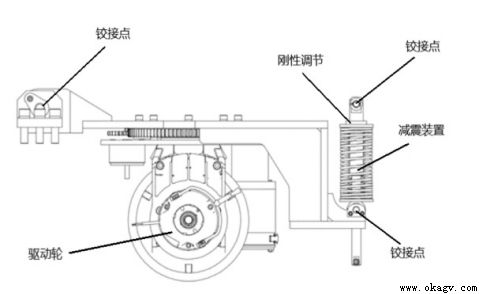
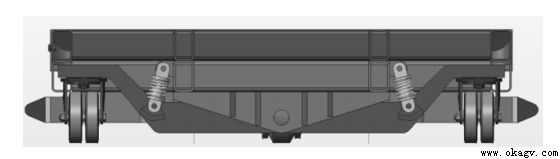
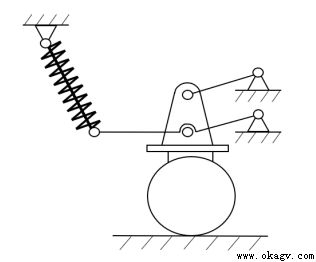
(1)Ϋ¬Ϋ”ΑΎΕ· ΫΓΘΫ¬Ϋ”ΑΎΕ· ΫΗΓΕ·ΫαΙΙ «”Π”ΟΫœΕύΒΡ“Μ÷÷Φθ’πΫαΙΙΘ§»γΆΦ6Υυ ΨΘ§«ΐΕ·¬÷”κΑ≤ΉΑΉυΙΧΕ®≤Δ”κ≥ΒΧε–Έ≥…Ϋ¬Ϋ”Θ§‘ρ«ΐΕ·ΒΞ‘Σ”κ≥ΒΧεΦδΩ…»ΤΫ¬Ϋ”Βψ1–ΐΉΣΑΎΕ·Θ§ Βœ÷…œœ¬ΖΫœρΒΡΗΓΕ·ΓΘΆ®Ιΐ‘Ύ«ΐΕ·ΒΞ‘Σ”κ≥ΒΧεΦδ…η÷ΟΒ·Μ…Φθ’πΉΑ÷ΟΘ§άϊ”ΟΒ·Μ…ΝΠά¥ΨωΕ®«ΐΕ·ΒΞ‘ΣΒΡΑΎΕ·ΖυΕ»ΓΘ
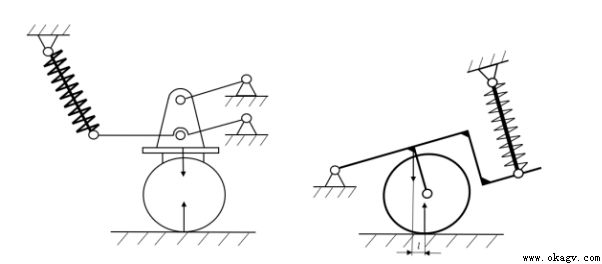
ΆΦ6 Ϋ¬Ϋ”ΑΎΕ· ΫœξœΗΫαΙΙΆΦ
ΆΦ7 Ϋ¬Ϋ”ΑΎΕ· ΫΫαΙΙΒΡ ήΝΠΆΦ
ΗΟάύΫαΙΙΒΡ«ΐΕ·¬÷÷ß≥–ΝΠ”κΒ·Μ…Ζ¥ΝΠΦδ¥φ‘ΎΝΠ±έΒΡΙΊœΒ(»γΆΦ7Υυ Ψ)Θ§‘Ύ–η“ΣΜώΒΟ“ΜΕ®ΒΡ«ΐΕ·¬÷÷ß≥–ΝΠœ¬Θ§ ΒΦ Β·Μ…Υυ–ηΒΡΒ·ΝΠ±»«ΐΕ·¬÷÷ß≥–ΝΠΗϋ–ΓΓΘ»ΜΕχΘ§ΗΓΕ·ΝΩΗ’ΚΟœύΖ¥Θ§‘Ύ«ΐΕ·ΒΞ‘Σ–η“ΣΜώΒΟ“ΜΕ®ΒΡΗΓΕ·ΝΩ ±Θ§Β·Μ…ΒΡ―ΙΥθΝΩ–η“Σ±»«ΐΕ·ΒΞ‘ΣΗΓΕ·ΝΩΒΡΗϋ¥σΓΘ
Μυ”Ύ…œ ωΧΊ–‘Θ§Ϋ¬Ϋ”ΑΎΕ· ΫΗΓΕ·ΫαΙΙ±»Ϋœ ”Ο”Ύ¥σ‘ΊΚ…ΓΔΩ’Φδ≥δΉψΒΡAGV¬÷œΒ≤ΦΨ÷…œΓΘΝΠ±έ”––ßΦθ–ΓΒ·Μ…Υυ–ηΒΡΗ’Ε»Θ§ΒΪΕ‘ΑΎΕ·Ω’ΦδΨΏ”–“ΜΕ®ΒΡ“Σ«σΓΘ
ΆΦ8 Ϋ¬Ϋ”ΑΎΕ· ΫΫαΙΙΒΡΥΪœρ≤ν“λ–‘
Β±AGV‘ΎΤ¬Βά÷–––ΉΏ ±Θ§ΤδΤ¬ΒάΖΫœρ»γΆΦ8ΒΡ…œΆΦΥυ ΨΘ§Τδ«ΐΕ·¬÷÷ß≥–ΝΠ”κΑΎΕ·Ϋ¬Ϋ”ΒψΦδΝΠ±έ≥ΛΕ»œύ±»Νμ“ΜΖΫœρΘ®ΆΦ8ΒΡœ¬ΆΦΘ©ΒΡ“ΣΕΧΓΘ‘ΎΒ·Μ…ΒΡ―ΙΥθΝΩ“ΜΕ® ±Θ§Φ¥Β·Μ…Ζ¥ΝΠ“ΜΕ®œ¬Θ§ΆΦ8…œΆΦΒΡ«ΐΕ·¬÷÷ß≥–ΝΠΗϋ¥σΘ§‘ΎAGVΗΚ‘ΊΫœ¥σ ±Θ§”ΠΒ±ΉΔ“β―ιΥψ«ΐΕ·¬÷‘ΊΚ… «Ζώ¥Π”ΎΕνΕ®ΖΕΈßΡΎΓΘ
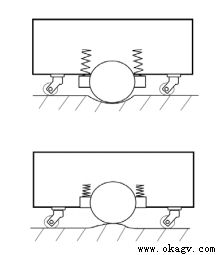
(2)¥Ι÷±ΒΦ÷υ ΫΓΘ¥Ι÷±ΒΦ÷υ ΫΗΓΕ·ΫαΙΙ «Ά®Ιΐ«ΐΕ·¬÷”κΑ≤ΉΑΉυΙΧΕ®Θ§Α≤ΉΑΉυ÷–…η÷Ο”–ΒΦΧΉ”κΒΦΗΥ–Έ≥…“ΤΕ·Η±Θ§ΒΦΗΥ…œ…η÷Ο”–―ΙΝΠΒ·Μ…ΒΡ“Μ÷÷Φθ’πΫαΙΙΓΘ«ΐΕ·ΒΞ‘ΣΆ®ΙΐΒΦ÷υΒΦΧΉΗ± Βœ÷…œœ¬ΗΓΕ·Θ§―ΙΝΠΒ·Μ…‘Ύ¥Ι÷±ΖΫœρ…œΗχ«ΐΕ·ΒΞ‘ΣΧαΙ© ζ÷±ΒΡΖ¥ΝΠΓΘ
ΆΦ9 ¥Ι÷±ΒΦ÷υ ΫœξœΗΫαΙΙΆΦ
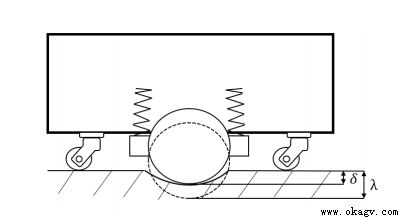
ΗΟΫαΙΙ”ΠΒ±Κœάμ≤Φ÷ΟΒΦ÷υ”κ«ΐΕ·¬÷ΦδΒΡΈΜ÷ΟΙΊœΒΘ§»γΆΦ10Υυ ΨΘ§ΈΣ±ήΟβ“ρΝΠΖ÷≈δ≤ΜΨυ‘»ΒΡ‘≠“ρΒΦ÷¬ΒΦ÷υ”κΒΦΧΉΦδ≤ζ…ζΝΠΨΊΘ§”ΠΫΪΝΫΒΦ÷υœύΕ‘«ΐΕ·¬÷¥ΞΒΊΒψΨ”÷–≤Φ÷ΟΓΘ»τΒΦ÷υΟΜ”–Ψ”÷–Ζ≈÷ΟΘ§ΝΫ±ΏΒΡΒ·Μ…Ζ¥ΝΠ≤Δ≤ΜœύΒ»Θ§‘λ≥…Ζ¥ΝΠΫœ¥σ“ΜΕΥ―ΙΥθΝΩΫœΕύΘ§Ζ¥ΝΠΫœ–Γ“ΜΕΥ―ΙΥθΝΩΫœ–ΓΘ§¥Υ ±Θ§ΒΦ÷υ”κΒΦΧΉΦδ±Ί»ΜΜα≤ζ…ζΝΠΨΊ Ι“ΤΕ·Η±ΖΔ…ζΩ®÷ΆΓΘ
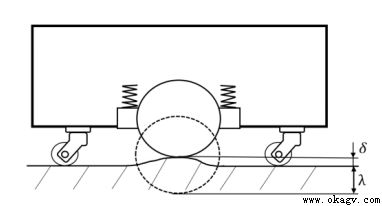
ΈΣΫχ“Μ≤ΫΖά÷ΙΒΦ÷υ”κΒΦΧΉΦδΖΔ…ζΩ®÷ΆΘ§»γΆΦ11Υυ ΨΘ§ΝΫΒΦ÷υΒΡ÷––ΡΝ§Ϋ”œΏ”Π¥Π”Ύ«ΐΕ·¬÷Ωμ÷––ΡΓΘ»γΆΦ12Υυ ΨΘ§Β±ΝΫΒΦ÷υΒΡ÷––ΡΝ§Ϋ”œΏΤΪάκ«ΐΕ·¬÷Ωμ÷––Ρ ±Θ§«ΐΕ·¬÷ΒΡ÷ß≥–ΝΠ”κΒ·Μ…Ζ¥ΝΠΦδ¥φ‘ΎΝΠΨΊΒΡΝΠ±έΘ§‘ΎΒΦΧΉ”κΒΦ÷υΒΡ≈δΚœΟφ…œ±ΊΕ®≤ζ…ζΕ‘ΕΞΝΠΘ§ Ι“ΤΕ·Η±ΖΔ…ζΩ®÷ΆΓΘ
ΆΦ10 ¥Ι÷±ΒΦ÷υ ΫΫαΙΙΒΡ ήΝΠΆΦ
ΆΦ11 ΒΦ÷υ≤ΦΨ÷–Έ Ϋ
ΆΦ12 ΒΦ÷υΤΪ“ΤΒΡ ήΝΠ«ιΩω
’ϊΧεΕχ―‘Θ§¥Ι÷±ΒΦ÷υ ΫΗΓΕ·ΒΡΫαΙΙ’Φ”ΟΧεΜΐΫœ–ΓΓΔΫαΙΙΦρΒΞΓΘ¥”≥…±ΨΖΫΟφΕχ―‘Θ§ «ΫœΈΣΨ≠ΦΟΒΡ“Μ÷÷Φθ’πΫαΙΙΘ§±»Ϋœ ”Ο”ΎΕ‘Ω’ΦδΨΏ”–œό÷ΤΒΡ«α÷–‘Ί¬÷œΒ≤ΦΨ÷ΓΘ
ΒΦ÷υΒΡ ή≈ΛΩ®÷Ά «ΗΟΫαΙΙΒΡΨ÷œόΒψΘ§ΈΣΫβΨωΗΟΈ ΧβΘ§”ΠΒ±Κœάμ≤ΦΨ÷ΒΦ÷υ”κ«ΐΕ·¬÷ΒΡœύΕ‘ΈΜ÷ΟΙΊœΒΓΘ‘Ύ¥ΥΆ§ ±Θ§‘ωΦ”ΒΦ÷υ”κΒΦΧΉΒΡ≈δΚœ≥ΛΕ»Θ§Ω…”––ßΦθ–Γ“ρ ή≈Λ≤ζ…ζΒΡΕ‘ΕΞΝΠΘ§Φθ–ΓΒΦ÷υΒΦΧΉΒΡΩ®÷ΆΗ≈¬ ΆβΘ§±ήΟβΒΦ÷υ ή≈ΛΆδ«ζ±δ–ΈΒΡΩ…ΡήΓΘ
(3)Φτ≤φ ΫΓΘΦτ≤φ ΫΗΓΕ·ΫαΙΙ «Μυ”ΎΦτ≤φΨΌ…ΐΫαΙΙΥυ―”…ξ≥ωά¥ΒΡ“Μ÷÷Φθ’πΫαΙΙΓΘΤδ÷–ΑϋΚ§ΝΥΦτ≤φ ΫΨΌ…ΐΫαΙΙΒΡ…œœ¬Ά–ΦήΘ§÷–ΦδΆ®ΙΐΦτ≤φΫχ––Ν§Ϋ”≤Δ‘ΎΝΫΆ–Φή÷–Φδ…η÷Ο”–Φθ’πΒ·Μ…ΓΘ
ΗΟΫαΙΙΒΡΦθ’πΗΓΕ·–Ά Ϋ”κΦτ≤φ ΫΨΌ…ΐœύΆ§Θ§‘Ύ”ωΒΫ¬ΖΟφ≤ΜΤΫ’ϊ ±Θ§œ¬Ά–ΦήΜα¥Ι÷±œρ…œ―ΙΥθ≤ΔΩΩΫϋ…œΆ–ΦήΘ§Ά§ ±Θ§œ¬Ά–Φή”κ…œΆ–ΦήΦδΥ°ΤΫΖΫœρ“≤ΜαΖΔ…ζΈΜ“ΤΓΘ
”…”ΎΦτ≤φΫαΙΙ‘ΎΗΏΕ»Ω’ΦδΒΡ’Φ”ΟΫœ¥σΘ§¥ΥΦθ’πΫαΙΙΗϋΕύΒΡ « ”Ο”Ύ≤νΥΌΒΞ‘ΣΡΘΩιΓΘΤδ÷–Θ§Φτ≤φΫαΙΙΒΡ÷–Φδ≤ΩΖ÷ΒΡΩ’ΦδΩ…“‘±Μ”––ßάϊ”ΟΘ§≤νΥΌ«ΐΕ·ΡΘΩι‘ΎΑϋΚ§¬ΖΟφ ”ΠΙΠΡήΆβΘ§ΤδΒΞ‘ΣΡΘΩιΜΙΨΏ±ΗœύΕ‘≥ΒΧε–ΐΉΣΒΡΉΣœρΙΠΡή“‘ΧαΗΏAGVΒΡΉΣœρ–‘ΡήΓΘ“ρ¥ΥΘ§ΙΊ”ΎΉΣœρΒΡΫαΙΙΆξ»ΪΩ…“‘Ζ≈÷Ο”ΎΦτ≤φΫαΙΙΒΡ÷–ΦδΩ’ΦδΘ§“‘ ΙΒΟ‘ΎΨΏ±ΗΦθ’π“‘ΦΑΉΣœρΙΠΡήΒΡΆ§ ±ΫΎ ΓΗϋΕύΒΡΩ’ΦδΓΘ
ΆΦ13 Φτ≤φ ΫΗΓΕ·œξœΗΫαΙΙΆΦ
ΆΦ14 Φτ≤φ ΫΗΓΕ·œξœΗΫαΙΙΆΦ
Φτ≤φ ΫΗΓΕ·ΫαΙΙ’ϊΧεœύΕ‘Φθ’πΡΘΩιΕχ―‘ΧεΜΐ’Φ”ΟΫœ¥σΘ§ΤδΗϋΕύ «”κ≤νΥΌΉΣœρΫαΙΙœύΫαΚœΘ§ΫΪΝΫ’ΏΫαΙΙΩ’ΦδΚœ≤ΔΓΘΤδΫαΙΙ≤Μ ”Ο”ΎΕ‘Ω’Φδ“Σ«σΫœΗΏ“‘ΦΑ¥χ”–ΉΣœρΙΠΡήΒΡΕφ¬÷≤ΦΨ÷ΓΘ
‘Ύ¬ΖΟφ ”Π–‘÷–Θ§Φτ≤φ ΫΫαΙΙΨΏ”–“ΜΕ®ΒΡΨ÷œό–‘ΓΘ»γΆΦ14Υυ ΨΘ§Β±ΝΫ«ΐΕ·¬÷ΒΡ¬ΖΟφΗΏΕ»≤Μ“Μ÷¬ ±Θ§”…”ΎΦτ≤φΫαΙΙ≤ΔΟΜ”–ΗϋΕύΒΡΉ‘”…Ε»ά¥ ”ΠΝΫ≤ύΒΡΗΏΕ»≤ΜΤΫΘ§‘ρ ΙAGV’ϊΧε±Μ«ψ–±ΒΊΕΞΤπΓΘ
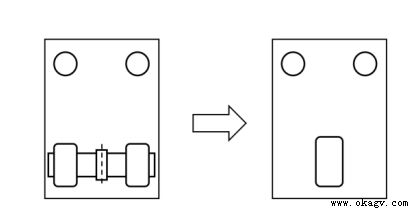
(4)ΑΎΕ·«≈ ΫΓΘΑΎΕ·«≈ ΫΫαΙΙΆ®Ιΐ’ϊ«≈ ΫΫΪΝΫΗω¬÷Ή”Ν§Ϋ”Τπά¥Θ§“‘«≈ΒΡ÷––ΡΉςΈΣΑΎΕ·÷––Ρ”κ≥ΒΧεΫ¬Ϋ”ΓΘΑΎΕ·«≈ ΫΒΡ¬ΖΟφ ”ΠΫαΙΙ≥ΘΦϊ”ΎΉΑ‘ΊΜζ“‘ΦΑœύΙΊΒΡΙΛ≥ΧΜζ–Β÷–Θ§Ά®Ιΐ ΆΖ≈’ϊ«≈ΒΡ–ΐΉΣΉ‘”…Ε»ά¥ ”ΠΒΊΟφΒΡ≤ΜΤΫ’ϊΓΘΒ·Μ…‘ΎΗΟΫαΙΙ÷–÷ς“ΣΤπΒΫΝΥΦθΜΚ≥εΜςΒΡΉς”ΟΘ§‘Ύ ΒΦ ΒΡ”Π”Ο÷–Θ§»τ¬ΖΟφΫωΫω÷Μ «≤ΜΤΫ’ϊΕχΟΜ”–Ηχ«ΐΕ·ΒΞ‘Σ¥χά¥ΗϋΕύΒΡ≥εΜςΘ§ΑΎΕ·«≈ ΫΒΡΗΓΕ·ΫαΙΙΩ…“‘Έό–κ…η÷ΟΒ·Μ…ΓΘΒΊ–ΈΒΡ≤ΜΤΫ’ϊ ΙΒΟΝΫ¬÷ΒΡ÷ß≥–ΝΠάκΑΎΕ·÷––ΡΒΡΨύάκ≤Μ“Μ―υΘ§‘ρΝΠ±έΫœ‘ΕΒΡ¬÷Ή”÷ß≥–ΝΠ–ΓΘ§ΝΠ±έΫœΕΧΒΡ¬÷Ή”÷ß≥–ΝΠ¥σΘ§ΗΓΕ·ΫαΙΙ”…¥Υά¥ ”Π¬ΖΟφΒΡ≤ΜΤΫΓΘ
Ε‘”Ύ“ΜΗωΑΎΕ·«≈ΫαΙΙΕχ―‘Θ§ΝΫΗω¬÷Ή” Φ÷’Ά®ΙΐΑΎΕ· ”Π≤ΜΤΫ¬ΖΟφΘ§ ΒΦ Ω… ”ΈΣΫΪ«≈…œΝΫΗω¬÷Ή”±δΜ·ΈΣ’ϊ«≈ΒΡ1Ηω¥σ¬÷Ή”ΓΘΡ«Ο¥Θ§Ε‘”ΎΑΎΕ·«≈ ΫΒΡΥΡ¬÷≤ΦΨ÷ά¥ΥΒΘ®ΆΦ 16Υυ ΨΘ©Θ§Φ¥ΫΪΥΡ¬÷≤ΦΨ÷±δΜ·ΈΣ»ΐ¬÷≤ΦΨ÷Θ§‘Ύ»ΐΒψ»ΖΕ®“ΜΗωΤΫΟφΒΡάμ¬έ…œΘ§»ΐΗω¬÷Ή”±Ί»ΜΫ”ΒΊΘ§¥”ΕχΫβΨωΝΥΥυ”–¬÷Ή”Ι≤Ά§Ή≈ΒΊΒΡΈ ΧβΓΘ
ΆΦ15 ΑΎΕ·«≈ ΫΗΓΕ·ΫαΙΙΦρΆΦ
ΆΦ16 ΑΎΕ·«≈ΒΡ¬÷œΒ―ί±δ
Ε‘”ΎΝυ¬÷≤ΦΨ÷Β»Εύ¬÷œΒ≤ΦΨ÷Θ§Ά®ΙΐΑΎΕ·«≈ ΫΫαΙΙ Βœ÷¬ΖΟφ ”Π‘ρ–η“Σ…η÷ΟΗϋΕύΉιΒΡΑΎΕ·«≈ΓΘ”……œ ωΖ÷ΈωΘ§“ΜΗωΑΎΕ·«≈Ω… ”ΈΣΫΪΝΫΗω¬÷Ή”±δΜ·ΈΣ1Ηω¬÷Ή”ΓΘ”…”Ύ»ΐ
¬÷±ΊΕ®Ϋ”ΒΊΘ§Νυ¬÷≤ΦΨ÷–κΫΪΝυ¬÷±δΜ·ΈΣ»ΐ¬÷Θ§Φ¥–η“Σ3ΉιΑΎΕ·«≈ΫαΙΙΓΘ
ΆΦ17 ΑΎΕ·«≈ΫαΙΙΨΏΧε”Π”Ο
Θ®5Θ©ΥΡ±Ώ–Έ ΫΓΘΥΡ±Ώ–Έ ΫΗΓΕ·ΫαΙΙ «Μυ”ΎΥΡΝ§ΗΥΒΡΑΎΕ·‘≠άμΘ§‘ΎΤδΜυ¥Γ…œ‘ωΦ”Φθ’πΒ·Μ…Θ§ ΙΤδΫαΙΙΑΎΕ· ±―ΙΥθΦθ’πΒ·Μ…Εχ Βœ÷ΒΡΦθ’π–ßΙϊΓΘ
ΥΡ±Ώ–Έ ΫΗΓΕ·ΫαΙΙΒΡΦθ’π–Ά Ϋ±»ΫœάύΥΤ”ΎΫ¬Ϋ”ΑΎΕ· ΫΗΓΕ·ΫαΙΙΘ§ΝΫ’ΏΨυ «Ά®Ιΐ»ΤΉ≈Ϋ¬Ϋ”Βψ–ΐΉΣά¥―ΙΥθΦθ’πΒ·Μ…¥”ΕχΤπΒΫΦθ’π–ßΙϊΘ§»ΜΕχΘ§’βΝΫ’Ώ‘Ύ‘ΥΕ·ΫαΙΙ“‘ΦΑ ήΝΠ…œ≤Μ»ΪœύΆ§ΓΘ
ΆΦ18 ΥΡ±Ώ–Έ ΫΗΓΕ·ΫαΙΙΦρΆΦ
»γΆΦ19 Υυ ΨΘ§ΥΡ±Ώ–Έ ΫΗΓΕ·ΫαΙΙΒΡ…œœ¬ΗΓΕ·ΖΫ Ϋ «ΥΡΝ§ΗΥΜζΙΙΒΡΑΎΕ·‘≠άμΘ§ΕχΫ¬Ϋ”ΑΎΕ· ΫΗΓΕ·ΫαΙΙΒΡ…œœ¬ΗΓΕ·ΖΫ Ϋ «»ΤΫ¬Ϋ”ΒψΉς‘≤÷ή‘ΥΕ·ΒΡ‘≠άμΓΘ
ΆΦ19 ΥΡ±Ώ–Έ Ϋ”κΫ¬Ϋ”ΑΎΕ· ΫΒΡ ήΝΠΕ‘±»
ΥΡΝ§ΗΥΒΡΑΎΕ·‘≠άμΩ… Βœ÷«ΐΕ·ΒΞ‘Σ‘ΎΗΓΕ· ±ΤδΉΥΧ§≤ΜΜαΖΔ…ζΗΡ±δΘ§ΕχΫ¬Ϋ”ΑΎΕ· ΫΫαΙΙΒΡ«ΐΕ·ΒΞ‘Σ‘ΎΗΓΕ·Ιΐ≥ΧΤδ«ψΫ«Μα÷πΫΞ±δΜ·ΓΘ«ψΫ«ΒΡ±δΜ· ΙΒΟ«ΐΕ·¬÷ΒΡ÷ß≥–ΝΠ”κΑ≤ΉΑΉυΒΡ÷ßΖ¥ΝΠΦδ≤ζ…ζΝΠ±έΘ§¥”Εχ Ι«ΐΕ·ΒΞ‘Σ ή≈ΛΓΘ
±μ1 AGV≥ΘΦϊΦθ’πΗΓΕ·ΫαΙΙΧΊΒψΖ÷Έω
ΥΡ±Ώ–Έ ΫΗΓΕ·ΫαΙΙ‘ΎΗΓΕ·Ιΐ≥Χ÷–ΉΥΧ§≤ΜΜαΖΔ…ζΗΡ±δΘ§Τδ«ΐΕ·ΒΞ‘Σ”κΑ≤ΉΑΉυΦδΒΡΝΠ Φ÷’Ι≤œΏΓΘ
ΥΡ±Ώ–Έ ΫΗΓΕ·ΫαΙΙΕ‘ ζ÷±ΖΫœρΒΡΩ’Φδ“Σ«σΫœ¥σΘ§ΤδΫαΙΙœύ±»Ϋ¬Ϋ”ΑΎΕ· ΫΫαΙΙΗ¥‘”Θ§¥ΥάύΫαΙΙ“ΜΑψ”Π”Ο”Ύ≤φ≥Β Ϋ AGV ΒΡΝΔ ΫΕφ¬÷“‘ΦΑ≤νΥΌ«ΐΕ·÷–ΓΘ
Ε‘AGV≥ΘΦϊΒΡΦθ’πΗΓΕ·ΫαΙΙΧΊΒψΖ÷ΈωΦϊ”Ύ±μ1ΓΘ¥”ΡΩ«ΑΙζΡΎΒΡ AGV Φθ’π–Ά Ϋά¥Ω¥Θ§¥σ‘Ί÷ΊΒΡΕφ¬÷≤ΦΨ÷ΗϋΕύΒΡ «≤…”ΟΫ¬Ϋ”ΑΎΕ· ΫΗΓΕ·ΫαΙΙΘ§Ε‘”Ύ‘Ί÷ΊΫœΈΣ–ΓΒΡΕφ¬÷≤ΦΨ÷‘ρ≤…”Ο¥Ι÷±ΒΦ÷υ ΫΫαΙΙΓΘΕ‘”Ύ≤νΥΌ«ΐΕ·Θ§Ε‘”Ύ¬ΖΟφ ”Π–‘“Σ«σΫœΗΏΒΡ≤ΦΨ÷“ΜΑψ≤…”ΟΕάΝΔ–ϋΙ“ΒΡΦθ’π–Ά ΫΘ§ΤδΑϋά®ΝΥΫ¬Ϋ”ΑΎΕ· ΫΓΔ¥Ι÷±ΒΦ÷υ ΫΓΔΥΡ±Ώ–Έ ΫΓΘ
AGVΒΡ÷ς“Σ¬÷œΒ≤ΦΨ÷ΑϋΚ§≤νΥΌ≤ΦΨ÷ΚΆΕφ¬÷≤ΦΨ÷Θ§’κΕ‘Τδ≤ΦΨ÷ΒΡ–Ά Ϋ≤ΜΆ§Θ§ΤδΦθ’πΒΡΫαΙΙΖΫ Ϋ“≤”ΠΒ±Ζ÷ΈωΤδ”ΑœλΒΡ«α÷ΊΓΘ
≤ΈΩΦΈΡœΉΘΚ
[1] ΥοΫ®Οώ . ΙΛ≥Χ≥ΒΝΨΦθ’πœΒΆ≥ΒΡΙΊΦϋΦΦ θΧΫΧ÷[J]. ÷ΰ¬ΖΜζ–Β”κ ©ΙΛΜζ–ΒΜ· ,2011,(6):80-82.
[2] ¬μ‘Ϋ , Άθ”άΕς , ¬μνΘ . ÷Ί‘Ί AGV Μζ–ΒΫαΙΙ…ηΦΤ[J]. Μζ–Β―–ΨΩ”κ”Π”Ο ,2018(2).
[3] ¬άΆθ±κ , ΝθξΜ , Έβ”άΚΘ . ΗΓΕ· Ϋ«ΐΕ·ΉΑ÷ΟΦΑAGV[P]. ΚΦ÷ίΘΚCN207257828U,2018-04-20.
[4] ÷ή’ΐΨϋ , ΝθΤδ–≈ , ¬§Μ‘ΈΡ . “Μ÷÷Ή‘Ε·ΒΦΚΫ≥ΒΒΡ«ΐΕ·–ϋΙ“ΉΑ÷ΟΦΑΉ‘Ε·ΒΦΚΫ≥Β[P]. ΙψΕΪΘΚCN106494257AΘ§2017-03-15.
[5] ≈μΜΣΟς , ÷λ÷“ , ≈μ«εΜΣ , ≤ήνΘ .AGV Εφ¬÷«ΐΕ·Φθ’πΜζΙΙΚΆAGVΕφ¬÷«ΐΕ·ΉΑ÷Ο[P]. ΙψΕΪΘΚCN206327106UΘ§2017-07-14.
[6] ’‘ΜΣΕΪ , –λ“Μ¥ε .AGV ΦτΒΕ≤φ ΫΦθ’πΒΞ‘Σ–ΐΉΣœόΈΜΜζΙΙ[P]. ΙψΕΪΘΚCN206187160UΘ§2017-05-24.ΈΡ’¬ά¥‘¥”ΎAGVΑ…
…œ“ΜΧθΘΚAGV÷«Ρή≤÷¥ΔΜζΤς»ΥΫαΙΙ”≈Μ·…ηΦΤ œ¬“ΜΧθΘΚAGVΉ‘”…¬ΖΨΕΒΦ“ΐΫι…ή
ΒγΜΑΘΚ0755-29851810
¥Ϊ’φΘΚ0755-27307147
Q QΘΚ2448209188
” œδΘΚzfj@okagv.com
ΒΊ÷ΖΘΚ…νέΎ –±ΠΑ≤«χΗΘΚΘΫ÷Βά¥σ―σ¬Ζ÷–ΝΗΗΘΑ≤ΜζΤς»ΥΩΤΦΦ‘Α14ΕΑ

Copyright © 2012-2023 …νέΎ –≈Ζνχ÷«ΡήΜζΤς»ΥΙ…Ζί”–œόΙΪΥΨ Αφ»®Υυ”–ΓΓ ‘ΝICP±Η 19115608 Κ≈ΓΓxml sitemap
ΝΣœΒΒγΜΑ
400-007-3860QQΉ…―·
2448209188ΈΔ–≈
ΈΔ–≈Ή…―·