Ή®“ΒΧαΙ©≤÷¥ΔΈοΝς…ΐΦΕΗΡ‘λΓΔΈό»ΥΑα‘ΥΜζΤς»Υ≤ζΤΖ
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860
“ΜΦ“Ή®ΉΔΗ¥ΚœΜζΤς»ΥΓΔ»ΪœρΦΛΙβAGV―–ΖΔ÷Τ‘λΙζΦ“ΗΏ–¬ΦΦ θΤσ“Β
»ΪΙζΖΰΈώ»»œΏ 400-007-3860





AGVΘ®Automated Guided VehicleΘ©–Γ≥ΒΉςΈΣΡΩ«ΑΙΛ“ΒΉ‘Ε·Μ·œΒΆ≥÷–÷Ί“ΣΒΡΉι≥…≤ΩΖ÷Θ§‘ΎΙΛ≥ßΚΆ≥ßΖΩΒΡΈοΝςΒςΕ»œΒΆ≥÷–ΤπΉ≈÷Ί“ΣΉς”Ο[1]Θ§”–Ή≈Ζ«≥ΘΙψΖΚΒΡ”Π”Ο«ΑΨΑΓΘ
¥ΪΆ≥ΒΡAGV–Γ≥ΒΩΊ÷Τ“‘Ψ≠ΒδΒΡPIDΩΊ÷ΤΈΣ÷ςΘ§ΒΪPIDΩΊ÷ΤΒΡΨΪ»Ζ≥ΧΕ»»ΓΨω”ΎœΒΆ≥ ΐ―ßΡΘ–ΆΒΡΨΪ»Ζ≥ΧΕ»ΦΑ≤Έ ΐ…η÷ΟΉ¥Ωω[2]ΓΘAGV–Γ≥Β‘ΎΙΛ≥ßΦΑ≥ßΖΩ÷–ΒΡΙΛΉςΜΖΨ≥Η¥‘”Θ§«“‘Ύ–– ΜΙΐ≥Χ÷–Μα ήΒΫΗς÷÷ΙΛΩωΒΡΗ…»≈Θ§¥ΪΆ≥ΒΡ PID ΩΊ÷Τ”– ±ΚήΡ―¥οΒΫΡ―“‘–ßΙϊ[3]ΓΘ
Μυ”Ύ¥ΥΘ§Ζ÷ΈωΝΥΡΘΚΐΩΊ÷ΤΜζάμΘ§’κΕ‘ AGV ÷–÷±ΝςΒγΜζΒΡΒςΥΌœΒΆ≥Θ§≤…”ΟΡΘΚΐ PID Ϋχ––ΩΊ÷ΤΘ§ΦΪ¥σΒΊΧαΗΏΝΥ÷«Ρή–Γ≥ΒΉΣΥΌΩΊ÷ΤΒΡΉΦ»Ζ–‘ΓΔΈ»Ε®–‘ΦΑΖ¥”ΠΥΌΕ»ΓΘ
AGV œΒΆ≥ΉΑ±ΗΝΥ¥≈ΒΦΚΫΓΔCCD ΒΦΚΫΓΔΦΛΙβΒΦΚΫΒ»[4]Θ§ ΙΒΟ AGV ‘Ύ–– ΜΙΐ≥Χ÷–ΡήΙΜΑ¥’’ ¬œ»ΙφΜ°ΒΡ¬ΖΨΕ‘Υ––Θ§≤ΌΉς’Ώ÷Μ–ηΗυΨί…œΈΜΜζΫχ––œ÷≥ΓΒΡ Β ±ΒςΕ»Θ§Ε‘”Ύ≤ΜΆ§ΒΡœ÷≥Γ‘Υ––«ιΩω AGV Ϋχ–– Β ±ΒΡœ÷≥ΓΒςΕ»Θ§“ρ¥ΥΘ§¥σ¥σΫΒΒΆΝΥΕ‘”Ύ»ΥΝΠΒΡ“άάΒΘ§ΧαΗΏΝΥΙΛΉς–߬ ΚΆΑ≤»ΪœΒ ΐΓΘ
AGVœΒΆ≥Ά®ΙΐΧυ‘ΎΒΊΟφ…œΒΡ¥≈ΒΦΚΫ¥ΪΗ–ΤςΫχ––ΒΦΚΫΘ§ Β ±ΦύΩΊAGV–Γ≥Βœ÷≥ΓΈΜ÷ΟΘ§œ÷≥ΓΒςΕ»Θ§±ήΟβAGV÷°ΦδΖΔ…ζ≈ωΉ≤ΓΘAGVΒΡΙ©ΒγœΒΆ≥”…Βγ≥ΊΧαΙ©Θ§ΝΫΩιΒγ≥ΊΑ≤ΉΑ‘ΎAGVΒΡΝΫΕΥΘ®“ΜΑψΈΣΕ‘≥ΤΑ≤ΉΑΘ©Θ§¥≈Η–”Π¥ΪΗ–ΤςΑ≤ΉΑ‘Ύ AGV ΒΡΝΫΕΥΘ§≤ζ…ζ“ΜΗω±’ΜΖΒΡœΒΆ≥ά¥Ϋχ–––Γ≥ΒΒΡ ΒΦ ΈΜ÷ΟΒΡœ÷≥ΓΒςΫΎ[5]ΓΘAGV¥σ–Γ”–ΚήΕύ÷÷Ζ÷άύΘ§Ε‘”Ύ¥σ–Ά AGVΒΡΒςΕ»–η“ΣΩΦ¬«ΤδΑ≤»ΪΖΕΈß «ΖώΉψΙΜΘ§ΉΣΆδ ± «Ζώ¬ζΉψœ÷≥Γ“Σ«σΓΘAGVœΒΆ≥ΝψΦΰΆΦ»γΆΦ 1 Υυ ΨΘ§Τδ÷–ΔΌΤτΕ·ΓΔΆΘ÷ΙΓΔΗ¥ΈΜΓΔΦ±ΆΘΑ¥≈ΞΘΜΔΎΚΆΔέΨυΈΣ 12 V Βγ≥ΊΘΜΔή¬÷Ή”ΘΜΔί»ΐ…ΪΒΤΘΜΔό¥ΪΥΆ¥χΘΜΔΏ¥ΞΟΰΤΝΘΜΔύ±ή’œ¥ΪΗ–ΤςΘΜΔαΕ‘…δ¥ΪΗ–ΤςΓΘAGVΥ≈ΖΰΑ≤ΉΑ»γΆΦ2Υυ ΨΘ§Τδ÷–Θ§ΔΌΈΣ«Α¥≈ΒΦΚΫ¥ΪΗ–ΤςΘΜΔΎΈΣΚσ¥≈ΒΦΚΫ¥ΪΗ–ΤςΘΜΔέΈΣΥ≈ΖΰΒγΜζΘΜΔήΈΣΥ≈Ζΰ«ΐΕ·ΤςΓΘ
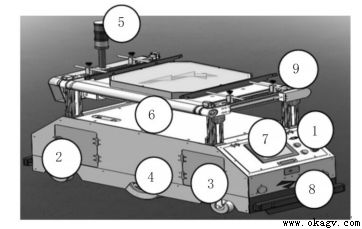
ΆΦ1 AGVœΒΆ≥ΝψΦΰΆΦ
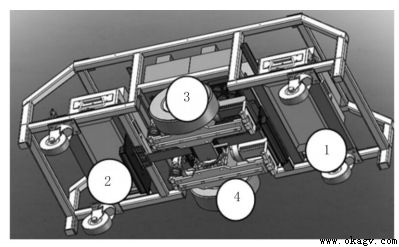
ΆΦ2 AGVΥ≈ΖΰΑ≤ΉΑΆΦ
Μυ”ΎΡΘΚΐPIDΒΡAGVΉΣΥΌΩΊ÷Τ»γΆΦ 3 Υυ Ψ[6]ΓΘ
«ΐΕ·ΩΊ÷ΤΤςΩΊ÷ΤΚλΆβ¥ΪΗ–ΤςΙΛΉςΘ§ΗυΨί ’Φ·ΒΫΒΡ¬ΖΩω―≠ΦΘ–≈œΔΒΟΒΫ–Γ≥ΒΒΡΥΌΕ»ΗχΕ®÷ΒΘ§Ά§ ±Θ§≥Β¬÷ΥΌΕ»Φλ≤βΡΘΩιΦλ≤β–Γ≥ΒΥΌΕ»Θ§Ϋχ––ΗτάκΓΔΖ≈¥σΓΔA/D ΉΣΜΜΚσ”κΗχΕ®ΥΌΕ»Ϋχ––±»ΫœΘ§»τΙΛ≥ßΒΡΈοΝςΒςΕ»¬ΖΨΕ”–…œ––ΓΔœ¬––ΜρΉΣΆδΉ¥ΩωΘ§ΥΌΕ»Φλ≤βΡΘΩιΦ¥Μα±μœ÷≥ω…œ…ΐΜρœ¬ΫΒœ÷œσΘ§ΫΪ¥ΥΤΪ≤ν–≈Κ≈ΥΆΗχΡΘΚΐ PID ΩΊ÷ΤΤςΘ§ΩΊ÷ΤΤςΫχ––ΡΘΚΐΙφ‘ρΒΡ―Γ‘ώΘ§ δ≥ωΨΪ»ΖΒΡΥΌΕ»¬ω≥ε–≈Κ≈ΥΆ»κΒγΝΠΒγΉ”÷¥––ΜζΙΙΘ§«ΐΕ·÷±ΝςΒγΜζΨΪ»ΖΒΡΑ¥’’ ΒΦ ¬ΖΩω―≠ΦΘΥΌΕ»‘Υ––ΓΘ
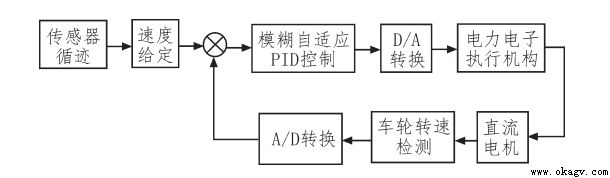
ΆΦ3 AGVΉΣΥΌΩΊ÷ΤΩρΆΦ
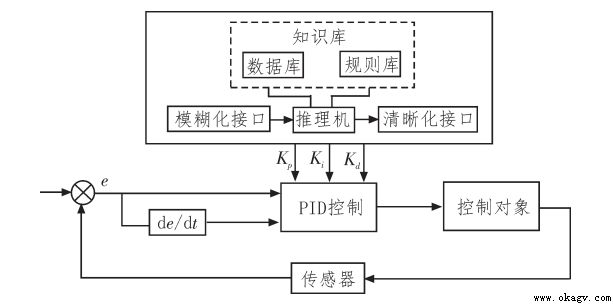
ΡΘΚΐ PID ΩΊ÷ΤΤςΫαΙΙ»γΆΦ 4Υυ ΨΘ§÷ς“ΣΖ÷ΈΣΝΫΗωΡΘΩιΘ§Τδ“Μ «¥ΪΆ≥ΒΡ PID ΩΊ÷ΤΤςΘ§ΤδΕΰ «ΡΘΚΐΩΊ÷ΤΤςΘ§ΡΘΚΐΩΊ÷ΤΤςά¥ Βœ÷ PID ΩΊ÷ΤΤς≤Έ ΐΒΡœ÷≥Γ»ΖΕ®Θ§ ΙΒΟ PIDΩΊ÷Τ–ßΙϊΗϋΦ”άμœκΜ·Θ§ΡΘΚΐPIDΩΊ÷ΤΤς÷ς“Σ « Βœ÷PID»ΐ¥σ≤Έ ΐΚΆΈσ≤νeΒΡ±δΜ·¬ Γςe÷°ΦδΒΡΙΊœΒΘ§‘Ύ‘Υ––Ιΐ≥Χ÷–ΗυΨίΈσ≤νΚΆΈσ≤νΒΡ±δΜ·¬ ≤ΜΕœ≈–ΕœΓΔΦΤΥψΉν÷’ΒΡ±»άΐΓΔΜΐΖ÷ΓΔΈΔΖ÷≤Έ ΐ[7]ΓΘ
ΆΦ4 ΡΘΚΐPIDΩΊ÷ΤΫαΙΙΆΦ
Μυ”Ύ…œ ωΫαΙΙΘ§AGVΉΣΥΌΩΊ÷ΤΡΘΚΐPID…ηΦΤΩ…Ζ÷ΈΣ“‘œ¬ 4Ηω≤Ϋ÷η[8-9]ΓΘ
ΒΎ“Μ≤ΫΘ§œΒΆ≥ δ»κ δ≥ω–≈Κ≈ΒΡ»ΖΕ®ΓΘAGV–Γ≥Β ΐΨί≤…―υ «Ά®Ιΐ¥≈ΒΦΚΫ¥ΪΗ–ΤςΒΡ16ΈΜ ΐΉ÷≤…―υΒψΘ§“‘I/O δ»κΒΡΡΘ ΫΫχ––Θ§Ά®ΙΐΖ÷Έω δ»κ–≈Κ≈ΒΡ≤ΜΆ§ά¥»ΖΕ®AGV–Γ≥Β ΒΦ Υυ¥ΠΒΡΈΜ÷Ο[10]Θ§¥≈ΒΦΚΫΈΣ 16¬Ζ 16Βψ ΐΉ÷ΝΩ δ≥ωΘ§“ΜΑψ’ΐ≥ΘΦλ≤ιΒΫΒΡ–≈Κ≈ΈΣ 5¬Ζ 5Βψ ΐΉ÷ΝΩ δ≥ωΘ§άμ¬έΖ÷ΈΣœ¬Οφ 20÷÷«ιΩωΘΚ
1000000000000000Θ®1Θ©
1100000000000000Θ®2Θ©
1110000000000000Θ®3Θ©
1111000000000000Θ®4Θ©
1111100000000000Θ®5Θ©
0111110000000000Θ®6Θ©
0011111000000000Θ®7Θ©
0001111100000000Θ®8Θ©
0000111110000000Θ®9Θ©
0000011111000000Θ®10Θ©
0000001111100000Θ®11Θ©
0000000111110000Θ®12Θ©
0000000011111000Θ®13Θ©
0000000001111100Θ®14Θ©
0000000000111110Θ®15Θ©
0000000000011111Θ®16Θ©
0000000000001111Θ®17Θ©
0000000000000111Θ®18Θ©
0000000000000011Θ®19Θ©
0000000000000001Θ®20Θ©
»Γ÷±ΝςΒγΜζΫ«ΥΌΕ»Έσ≤ν e ΚΆΈσ≤ν±δΜ·¬ ec ΈΣœΒΆ≥ δ»κ±δΝΩΘ§ΠΛKpΓΔΠΛKiΓΔΠΛKdΈΣ δ≥ω±δΝΩΓΘΫΪΈσ≤ν e ”κΈσ≤ν±δΜ·¬ ecΒΡΡΘΚΐΜυ±Ψ¬έ”ρ»ΓΈΣ[-6Θ§6]ΓΘ
Ά®Ιΐ±»άΐΓΔΝΩΜ·“ρΉ””≥…δΒΫ¬έ”ρΘΚ…η¥≈ΒΦΚΫ¥ΪΗ–ΤςΒΡ 16¬Ζ δ≥ω“ά¥Έ¥”ΉσΒΫ”“ΈΣΘ®1Θ©Γζ-6Θ§Θ®2Θ©Γζ-5Θ§Θ®3Θ©Θ®4Θ©Γζ-4Θ§Θ®5Θ©Θ®6Θ©Γζ-3Θ§Θ®7Θ©Γζ-2Θ§Θ®8Θ©Θ®9Θ©Γζ-1Θ§Θ®10Θ©Θ®11Θ©Γζ0Θ§Θ®12Θ©Θ®13Θ©Γζ1Θ§Θ®14Θ©Γζ2Θ§Θ®15Θ©Θ®16Θ©Γζ3Θ§Θ®17Θ©Θ®18Θ©Γζ4Θ§Θ®19Θ©Θ®20Θ©Γζ5
ΒΎΕΰ≤ΫΘ§œΒΆ≥ δ»κ δ≥ω±δΝΩΡΘΚΐΜ·ΓΘ
…ηΦΤ÷–ΫΪeΓΔecΓΔΠΛKpΓΔΠΛKiΓΔΠΛKdΒΡΝΩΜ·Β»ΦΕΨυ…ηΈΣ13ΦΕΘ§Φ¥2Ηω δ»κ±δΝΩ“ΜΗω δ≥ω±δΝΩ‘ΎΡΘΚΐΦ·…œΒΡ¬έ”ρΈΣΘΚ{-6Θ§-5Θ§-4Θ§-3Θ§-2Θ§-1Θ§0Θ§+1Θ§+2Θ§+3Θ§+4Θ§+5Θ§+6}ΓΘΕ‘”ΠΒΡΡΘΚΐ”ο―‘ΈΣ{NBΘ§NMΘ§NSΘ§ZOΘ§PSΘ§PMΘ§PB}Θ§ΗΟΦ·Κœ÷–‘ΣΥΊΖ÷±π¥ζ±μΗΚ¥σΓΔΗΚ÷–ΓΔΗΚ–ΓΓΔΝψΓΔ’ΐ–ΓΓΔ’ΐ÷–ΓΔ’ΐ¥σ[11-12]ΓΘΑ―…œ ωΦ·ΚœΒΡ‘ΣΥΊΟη ωΈΣAGV –Γ≥ΒΒΡΦ”ΓΔΦθΥΌΉ¥ΩωΘ§‘ρΈΣΘΚNB ±μ Ψ¥σΦθΥΌΓΔNM±μ Ψ÷–ΦθΥΌΓΔNS±μ Ψ–ΓΦθΥΌΓΔZO ±μ Ψ±Θ≥÷Β±«ΑΉΣΥΌΓΔPS ±μ Ψ–ΓΦ”ΥΌΓΔPM ±μ Ψ÷–Φ”ΥΌΓΔPB ±μ Ψ¥σΦ”ΥΌΓΘΩΦ¬«ΒΫ AGV –Γ≥Β‘Ύ ΒΦ ‘Υ––÷–≤ζ…ζΒΡΈσ≤ν «ΥφΜζΒΡΘ§“ρ¥ΥΘ§≤…”Ο»ΐΫ«–ΈΝΞ τΚ· ΐΘ§»γΆΦ 5Υυ ΨΓΘ
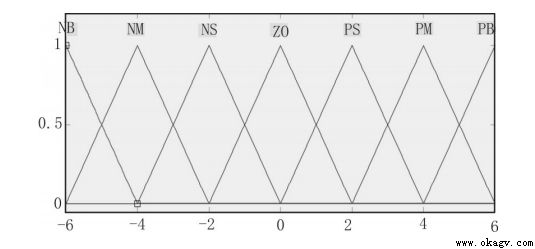
ΆΦ5 »ΐΫ«–ΈΝΞ τΚ· ΐΆΦ
ΒΎ»ΐ≤Ϋ ΡΘΚΐΙφ‘ρΩβΒΡΫ®ΝΔΓΘ
ΡΘΚΐΙφ‘ρΩβΒΡΫ®ΝΔΦ¥ΈΣ’“≥ω‘Υ–– ±ΩΧPΓΔIΓΔD”κΈσ≤νeΦΑΈσ≤ν±δΜ·¬ ec÷°ΦδΒΡΡΘΚΐΙΊœΒΓΘΆ®ΙΐeΚΆecΒΡ±δΜ·Ιφ¬…Θ§”Π”ΟΥυ÷ΤΕ®ΒΡΡΘΚΐΩΊ÷ΤΙφ‘ρΘ§¥”ΕχΒς’ϊΠΛKpΓΔΠΛKiΓΔΠΛKd»ΐΗω≤Έ ΐ÷ΒΘ§ ΙAGV–Γ≥Β‘Ύ‘Υ––Ιΐ≥Χ÷–”–ΝΦΚΟΒΡΕ·Χ§–‘ΦΑΈ»Ε®–‘[13-14]ΓΘ”Π”Ο‘Ύ÷«Ρή–Γ≥Β÷–Θ§Ε‘ΥΌΕ»Έσ≤νeΒΡΩΊ÷ΤΙφ¬…”»ΈΣ÷Ί“ΣΘ§≤ΜΚœ ΒΡΩΊ÷ΤΙφ¬…Μα ΙAGVΒΡΥΌΕ»≤ζ…ζ’ώΒ¥Θ§Ε‘≤ΜΆ§≥ΒΦδΒΡ≤ΜΆ§¬ΖΨΕΟΜ”–ΚήΚΟΒΡ ”Π–‘ΓΘΒ±≥ΒΧε ΒΦ ‘Υ––ΥΌΕ»ΚΆΤΎΆϊΥΌΕ»ΤΪ≤νe¥σ ±Θ§ΈΣΝΥΦ”ΥΌœΒΆ≥ΒΡΗζΉΌΥΌΕ»Θ§”Π»ΓΫœ¥σΒΡKpΘΜΒΪ «ΈΣΝΥ±ήΟβ”…”ΎΩΣ Φ ±ΤΪ≤νeΒΡΥ≤Φδ±δ¥σΩ…Ρή≥ωœ÷ΒΡΈΔΖ÷Ιΐ±ΞΚΆΕχ ΙΩΊ÷ΤΉς”Ο≥§≥ω–μΩ…ΖΕΈßΘ§”Π»ΓΫœ–ΓΒΡKdΘ§Ά§ ±ΈΣΝΥΖά÷ΙœΒΆ≥ΥΌΕ»œλ”Π≥ωœ÷Ϋœ¥σΒΡ≥§ΒςΘ§≤ζ…ζΜΐΖ÷±ΞΚΆΘ§”ΠΕ‘ΜΐΖ÷Ής”ΟΦ”“‘œό÷ΤΘ§Ά®≥Θ»ΓKi=0Β»ΓΘΗυΨίAGVΒΡ≤ΌΉςΨ≠―ιΘ§Ω…ΒΟΉΣΥΌΩΊ÷Τ δ≥ω≤Έ ΐΘ®ΠΛKpΓΔΠΛKiΓΔΠΛKdΘ©ΒΡΡΘΚΐΙφ‘ρΩβ»γ±μ 1Υυ Ψ[15-17]ΓΘ
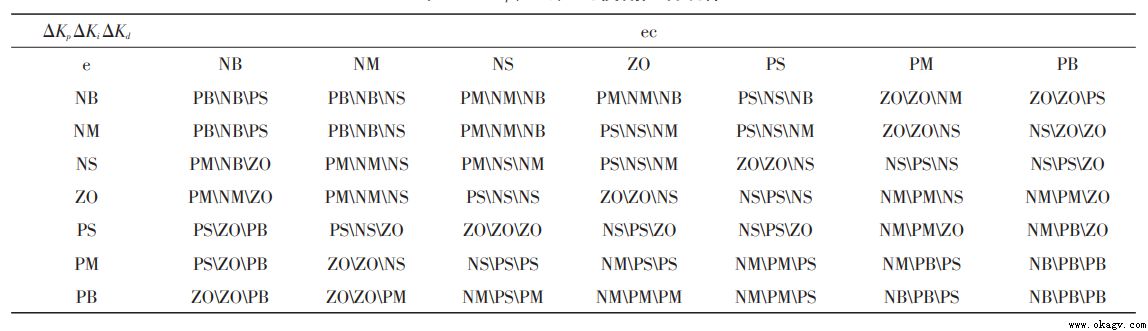
±μ1 ΠΛKpΓΔΠΛKiΓΔΠΛKdΡΘΚΐΩΊ÷ΤΙφ¬…
ΡΘΚΐΩΊ÷ΤΤς δ≥ωΝΩ «ΡΘΚΐΝΩΘ§≤ΜΡή÷±Ϋ””Οά¥ΩΊ÷Τ÷±ΝςΒγΜζΒΡΉΣΥΌΘ§‘ΎAGV ΒΦ ΩΊ÷Τ ±“ΣΫΪ’β–©ΫαΙϊΉΣΜ·ΈΣΨΪ»ΖΝΩΓΘΩΦ¬«ΒΫ÷Ί–ΡΖ®ΡήΫœΚΟΒΡΖ¥”≥ΩΊ÷ΤΝΩΒΡ’φ ΒΖ÷≤Φ«ιΩωΘ§“ρ¥ΥΘ§‘Ύ±Ψ…ηΦΤ÷–≤…”Ο÷Ί–ΡΖ®Ε‘ΡΘΚΐ±δΝΩΫχ––ΉΣΜ·ΓΘ
ΈΡ÷–≤…”ΟAB PLCΉςΈΣΩΊ÷Τ…η±ΗΘ§”ΟΧί–ΈΆΦΕ‘PIDΩΊ÷ΤΤςΚΆΡΘΚΐΩΊ÷ΤΤςΫχ––…ηΦΤΘ§ΈΣΝΥΩ…“‘ΩλΥΌœλ”ΠAGV–Γ≥ΒΒΡ ΒΦ ΈΜ÷ΟΘ§≤…―υ ±Φδ…ηΈΣ100mmsΓΘΒγ¬ΖΚΆΤχ¬ΖΝ§Ϋ”Άξ≥…≤ΔΦλ≤ιΈόΈσΚσΘ§Ά®Βγœ¬‘Ί≥Χ–ρ≤Δ‘ΎœΏΦύΩΊ≥Χ–ρ‘Υ––ΓΘΝ§Ϋ”¬Ζ”…ΤςΘ§Ϋχ–– AB PLC ΒΡ IP…η÷ΟΓΘΨΏΧεΒΡΒς ‘Ιΐ≥Χ»γœ¬ΘΚ
1Θ©‘Ύ÷ς≤ΥΒΞΜ≠Οφ÷– LCD ΒΡ Ι”ΟΦϋ≈Χ…œΒΡ Up ΚΆDownΦϋ―Γ Advanced SetΓΘ
2Θ©Ά®ΙΐΒψΜς LCD Φϋ≈Χ…œΒΡ OK ΦϋΦ¥Ω…≥ωœ÷ΗΏΦΕ…η÷Ο≤ΌΉςΫγΟφΘ§»γΆΦ 6 Υυ ΨΓΘΗΟΫγΟφ…œ”–ΓΑUpΓ±ΚΆΓΑDownΓ±…œΓΔœ¬Ζ≠ΉΣΦϋ”Οά¥―Γ‘ώ ENET ΙΠΡήΘ§―Γ‘ώΚΟ÷°ΚσΒψΜς OK ΦϋΦ¥Ω…Ϋχ»κΓΘ
3Θ© Ι”ΟΓΑUpΓ±ΚΆΓΑDownΓ±…œΓΔœ¬Ζ≠ΉΣΦϋΕ‘ IP ΒΊ÷ΖΫχ––…η÷ΟΘ§…η÷ΟΚΟΒΡ IPΒΊ÷ΖΒψΜς OK ΦϋΦ¥Ω…ΓΘ
ΆΦ6 PID≤Έ ΐ≥Χ–ρΒς ‘ΫγΟφΆΦ
4Θ© δ»κΟή¬κ≤ΌΉςΫγΟφΘ§‘Ύ±Ψ AGV –Γ≥ΒΩΊ÷ΤœΒΆ≥÷– Θ§Ά® Ιΐ LeftΓΔRightΓΔUp ΚΆ Down Φϋ Βœ÷Master passwordΒΡ…η÷ΟΘ§ΗΟΟή¬κΉν¥σ≥ΛΕ»ΈΣ10ΈΜ ΐΉ÷Θ§‘Ύ±Ψ≤ΌΉςœΒΆ≥÷–Θ§…η÷Ο 1234ΈΣ Master passwordΓΘ
5Θ©Οή¬κ―ι÷ΛΫγΟφΘ§»τ δ»κΒΡΟή¬κ’ΐ»ΖΘ§‘ρœ‘ Ψ“‘ΧΪΆχΆχ¬γάύ–Ά―Γ‘ώΫγΟφΘ§ΒψΜςΓΑUpΓ±ΚΆΓΑDownΓ±…œΓΔœ¬Ζ≠ΉΣΦϋ―Γ‘ώΚœ ΒΡΆχ¬γάύ–ΆΘΜ»τ δ»κΟή¬κ≤Μ’ΐ»ΖΘ§‘ρ≤ΌΉςΫγΟφΜαΧα ΨΟή¬κ”–ΈσΒΡ¥μΈσ–≈œΔΓΘ
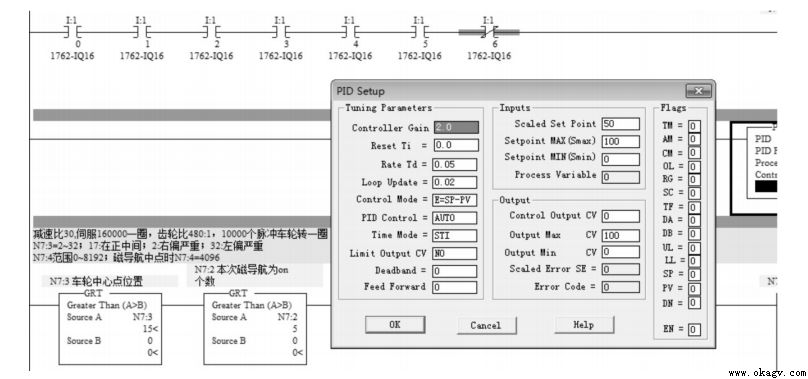
6Θ©Ε‘Άχ¬γΒΡIPΒΊ÷Ζ“‘ΦΑΉ”Άχ―Ύ¬κΒ»–≈œΔΫχ––…η÷ΟΓΘΒς ‘Ιΐ≥ΧΆξ≥…ΚσΘ§ΆΦ 7 ΚΆΆΦ 8 Ζ÷±πœ‘ ΨΝΥ¥ΪΆ≥PID ΚΆ±Ψ…ηΦΤΒΡΡΘΚΐ PID Βœ÷ΫαΙϊΓΘΩ…“‘Ω¥≥ωΘ§ΡΘΚΐPID ΩΊ÷Τ”–ΫœΕΧΒΡœλ”Π ±ΦδΘ§Ϋœ–ΓΒΡ≥§ΒςΘ§ΡήΫœΩλΫχ»κΈ»Χ§Θ§“ρ¥ΥΘ§ΡήΗϋΚΟΒΡΗζΉΌ AGV –Γ≥ΒΥΌΥΌΩΊ÷ΤΓΘ
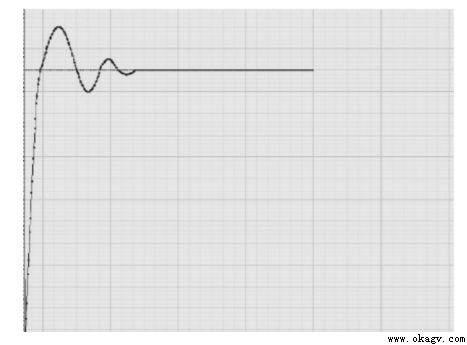
ΆΦ7 PIDœλ”ΠΆΦ

ΆΦ8 ΡΘΚΐPIDœλ”ΠΆΦ
ΈΡ÷–Ϋι…ήΝΥAGV–Γ≥ΒΒΡΙΙ≥…Θ§‘Ύ¥ΥΜυ¥Γ…œΘ§’κΕ‘–Γ≥ΒΒΡΉΣΥΌΩΊ÷ΤœΒΆ≥Θ§…ηΦΤΝΥΉΣΥΌΡΘΚΐPIDΩΊ÷ΤΤςΘ§≤Δ‘ΎPLC…η±Η…œΫχ––ΝΥ ΒΦ ―ι÷ΛΘ§”κ¥ΪΆ≥PIDΩΊ÷Τœύ±»Θ§AGVΡΘΚΐ PID ΉΣΥΌΩΊ÷ΤΤςœλ”Π ±ΦδΕΧΘ§œλ”ΠΙΐ≥ΧΈό’ώΒ¥Έό≥§ΒςΘ§”–ΫœΚΟΒΡΕ·ΓΔΈ»Χ§–‘ΡήΓΘ
[1] ‘χλ≈. Μυ”ΎΡΘΚΐΩΊ÷ΤΒΡ¥≈“ΐΒΦAGVœΒΆ≥¬ΖΨΕ–Θ’ΐΒΡ”Π”Ο―–ΨΩ[D]. ΚΦ÷ίΘΚΚΦ÷ίΒγΉ”ΩΤΦΦ¥σ―ßΘ§2015.
[2] Mendes JΘ§Araujo RΘ§Matias TΘ§et al. Automatic extraction of the fuzzy control system by a hierar⁃ chical genetic algorithm[J]. Engineering Applica⁃ tions of Artificial IntelligenceΘ§2014Θ§29Θ®3Θ©ΘΚ70-78.
[3] Baturone IΘ§Moreno-Velo FJΘ§Śnchez-Solano SΘ§et al. Automatic design of fuzzy controllers for carlike autonomous robots[J]. IEEE Transactions on Fuzzy SystemsΘ§2004Θ§12Θ®4Θ©ΘΚ447-465.
[4] ΥΈ―ßœΆΘ§ΧΗΚξΜΣΘ§≈Υ’ΐ¥ΚΘ§Β». Μυ”ΎΉ‘ ”ΠΡΘΚΐPIDΒΡAGVΗΏΨΪΕ»―ΑΦΘœΒΆ≥ΒΡ―–ΨΩ[J]. ΙζΡΎΆβΜζΒγ“ΜΧεΜ·ΦΦ θΘ§2012Θ®1Θ©ΘΚ29-31.
[5] Έδ–«Θ§¬Ξ≈εΜΆΘ§ΧΤΕΊ±χ. Ή‘Ε·ΒΦ“ΐ≥Β¬ΖΨΕΗζΉΌΚΆΥ≈ΖΰΩΊ÷ΤΒΡΜλΚœ‘ΥΕ·ΩΊ÷Τ[J]. Μζ–ΒΙΛ≥Χ―ß±®Θ§2011Θ§47Θ®3Θ©ΘΚ43-48.
[6] “ΕΫπωΈ. Μυ”ΎΡΘΚΐ PID ΒΡ÷«Ρή–Γ≥ΒΩΊ÷ΤΥψΖ®―–ΨΩ[J]. Β―ιΩΤ―ß”κΦΦ θΘ§2016Θ§14Θ®1Θ©ΘΚ46-47.
[7] Άθ ω―εΘ§ Π”νΘ§Ζκ÷“–ς. Μυ”ΎΡΘΚΐ PID ΩΊ÷ΤΤςΒΡΩΊ÷ΤΖΫΖ®―–ΨΩ[J]. Μζ–ΒΩΤ―ß”κΦΦ θΘ§2011Θ§30Θ®1Θ©ΘΚ166-172.
[8] ΜΤ”―»ώΘ§«ζΝΔΙζ.PID ΩΊ÷ΤΤς≤Έ ΐ’ϊΕ®”κ Βœ÷ΘέMΘί.
[9] ΧάΚλ≥œΘ§άν÷χ–≈Θ§Άθ’ΐΧΈΘ§Β». “Μ÷÷ΡΘΚΐPIDΩΊ÷ΤœΒΆ≥[J]. ΒγΜζ”κΩΊ÷Τ―ß±®Θ§2005Θ§9Θ®2Θ©ΘΚ136-138.
[10]ΦΆ―«ΖΦΘ§’≈÷ΨΗ’. Μυ”ΎΡΘΚΐ PID ΒΡΥΪ»ίΥ°œδ“ΚΈΜΩΊ÷ΤœΒΆ≥…ηΦΤ[J]. …ΫΈς ΠΖΕ¥σ―ß―ß±®Θ®Ή‘»ΜΩΤ―ßΑφΘ©Θ§2019Θ§33Θ®2Θ©ΘΚ37-40.
[11]άν―‘ΟώΘ§Ογ–άΘ§ΫΣΗΕΫήΘ§Β». Μυ”ΎΡΘΚΐPID ΩΊ÷ΤΤςΒΡΕύΒγΜζΫΜ≤φώνΚœΩΊ÷ΤΆ§≤ΫΩΊ÷ΤœΒΆ≥…ηΦΤ[J]. ΒγΙΛΦΦ θΘ§2005Θ®3Θ©ΘΚ118-120.
[12]ΆθΫ®ΚλΘ§≥¬“Ϊ÷“Θ§≥¬ΙπΘ§Β». Μυ”ΎΫΜ≤φώνΚœΩΊ ÷ΤΒΡΥΪΒγΜζΆ§≤ΫΩΊ÷ΤœΒΆ≥―–ΨΩ[J]. ΡœΨ©άμΙΛ¥σ―ß―ß±®Θ§2017Θ§41Θ®6Θ©ΘΚ693-697.
[13]’≈–ΓΨξ. Μυ”ΎAT89S51ΒΞΤ§ΜζΒΡ≥ΐ―θΤςΈ¬Ε»ΩΊ÷ΤœΒΆ≥ΒΡ…ηΦΤ[J]. ΖΡ÷·ΗΏ–ΘΜυ¥ΓΩΤ―ß―ß±®Θ§2010Θ®3Θ©: 372-376.
[14]Ψœ…ΐΜ‘Θ§άν―νΟώ. Ζ«Άξ’ϊ‘Φ χ“ΤΕ·ΜζΤς»Υ¬έ”ρΉ‘Βς’ϊΡΘΚΐΩΊ÷Τ―–ΨΩ[J]. ΒγΉ”…ηΦΤΙΛ≥ΧΘ§2016Θ§24Θ®5Θ©ΘΚ103-106.
[15]–λ÷ΘΝ÷Θ§÷λΫ®≤®Θ§÷ΘΈΑΫήΘ§Β». Μυ”ΎΡΘΚΐΩΊ÷ΤΒΡΒγΕ·Τϊ≥Β≥δΒγΤςΒΡ―–ΨΩ[J]. ΒγΉ”…ηΦΤΙΛ≥ΧΘ§2017Θ§25Θ®12Θ©ΘΚ85-88.
[16]Άθη¥Θ°“Μ÷÷Μυ”ΎΡΘΚΐΩΊ÷ΤΒΡΕύ¥ΪΗ–ΤςΙήάμΥψΖ®ΒΡ―–ΨΩ[J]Θ°ΒγΉ”…ηΦΤΙΛ≥ΧΘ§2018Θ§26Θ®21Θ©ΘΚ47-51.
[17]Υ’―οΘ§ΝθΈΡ―‘Θ§ΝθδλΘ§Β». Μυ”ΎΡΘΚΐΩΊ÷ΤΒΡΟΛ»Υ±ή’œœΒΆ≥…ηΦΤ[J]. –≈œΔΆχ¬γΑ≤»ΪΘ§2014Θ®6Θ©ΘΚ67-71.ΈΡ’¬ά¥‘¥”ΎAGVΑ…
…œ“ΜΧθΘΚ÷«ΡήΙΛ≥ßΕύΑα‘Υ‘ΊΧεΘ®Ε―ΕβΜζΓΔAGVΓΔΜζ–Β ÷Θ©–≠Ά§Ής“Β”≈Μ· œ¬“ΜΧθΘΚAGV÷«Ρή≤÷¥ΔΜζΤς»ΥΫαΙΙ”≈Μ·…ηΦΤ
ΒγΜΑΘΚ0755-29851810
¥Ϊ’φΘΚ0755-27307147
Q QΘΚ2448209188
” œδΘΚzfj@okagv.com
ΒΊ÷ΖΘΚ…νέΎ –±ΠΑ≤«χΗΘΚΘΫ÷Βά¥σ―σ¬Ζ÷–ΝΗΗΘΑ≤ΜζΤς»ΥΩΤΦΦ‘Α14ΕΑ

Copyright © 2012-2023 …νέΎ –≈Ζνχ÷«ΡήΜζΤς»ΥΙ…Ζί”–œόΙΪΥΨ Αφ»®Υυ”–ΓΓ ‘ΝICP±Η 19115608 Κ≈ΓΓxml sitemap
ΝΣœΒΒγΜΑ
400-007-3860QQΉ…―·
2448209188ΈΔ–≈
ΈΔ–≈Ή…―·